
嵌入硬磁颗粒的磁功能软材料,兼具硬磁体的高剩磁特性与软材料的高柔韧性,在复杂驱动器、传感器及柔性电子器件领域展现出广阔的应用前景。在众多的制造工艺中,磁场辅助 DLP 技术(MFA-DLP)凭借更高的结构精度和灵活的磁化设计,能够实现磁畴的三维定向排列。然而,该方法仍存在固有局限:一是预磁化颗粒在对齐过程中取向不完全,导致剩磁强度降低;二是颗粒极易发生聚集并形成稳定的链状结构,阻碍后续的磁排布步骤。随着排布循环次数的增加,颗粒聚集现象愈发严重,显著损害了制造的可靠性。
针对上述难题,本实验室赵朋教授团队提出了一种动态磁场辅助DLP(DMFA-DLP)制造方法。该方法通过引入动态磁场,显著提升了磁性颗粒在打印过程中的排列效率与分布均匀性,使样品的初始剩磁达到12.75 A·m²/kg,在低磁场环境下的排布率提升幅度最高可达212%。该技术有效抑制了粒子聚集现象,大幅提高了制造可靠性,并成功实现了高达24个方向的复杂磁化排布。
该工作以“Dynamic Magnetic Alignment Boosts Remanence and Fabrication Reliability in DLP Manufacturing of Magnetic Functional Materials”为题发表在《Advanced Materials》上并入选了当期彩页推荐(Frontispiece),浙江大学机械工程学院博士生孙浩南为论文第一作者,赵朋教授、张承谦副研究员、潘程枫研究员为论文通讯作者,流体动力基础件与机电系统全国重点实验室为第一单位,该工作得到国家自然科学基金委的支持。
1. 动态磁场辅助DLP工艺
如图1所示,在磁场辅助DLP制造开始前,首先根据材料的磁排布设计将模型分为若干区域,分别进行切片。制造时,先施加一个方向的排布磁场使硬磁颗粒完成排布,再投影该排布方向对应的模型切片,使该区域获得预设的磁排布。之后,调整磁场方向,未固化区域中的磁颗粒会在新方向上完成排布,已固化区域中的磁颗粒则保持原有排布,这时再对另一区域进行曝光,即可获得具有不同排布方向的区域。不断重复这一“排布-固化”循环,即可实现具有复杂磁排布的磁性材料的制造。
在本研究中,研究人员将动态辅助磁场加入到每次“排布-固化”循环之前。由平面内的旋转磁场和垂直方向的震荡磁场构成的动态辅助磁场能够打散磁颗粒链并将磁颗粒均匀分布。这确保了磁颗粒每次被排布时都是均匀易排的状态,使排布效果更好且更均匀,从而实现材料剩磁强度、多层打印可靠性以及多向排布结构制造能力三方面的重要提升。
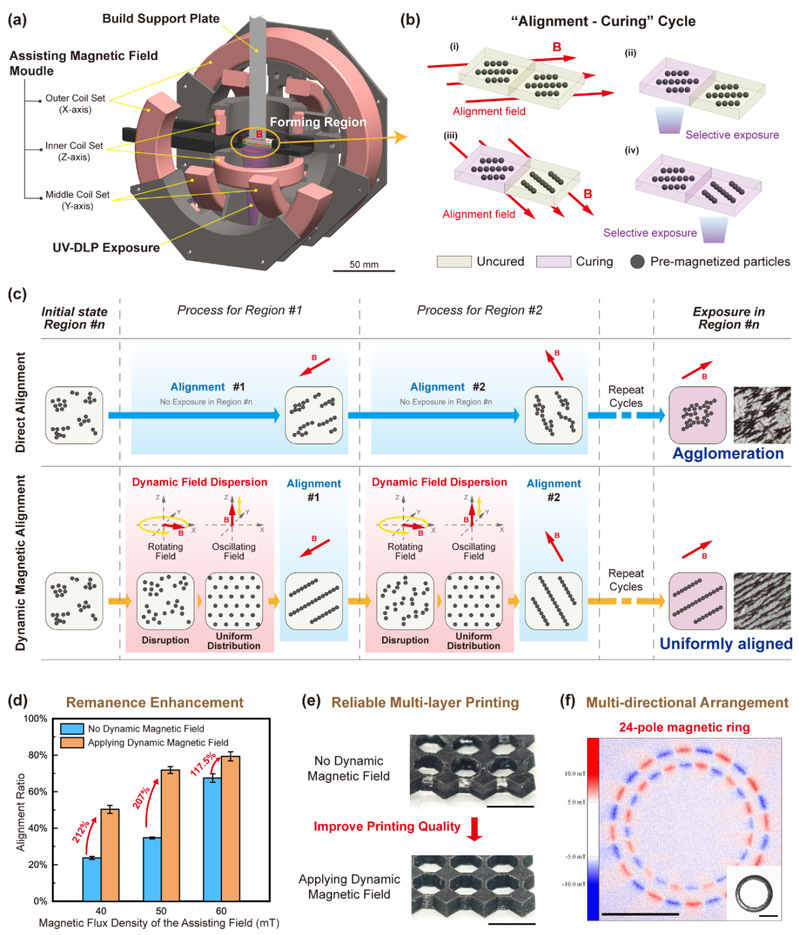
图1 动态磁场辅助DLP工艺示意图
2. 结构剩磁强度提高
为验证动态磁场对材料性能的提升,研究人员对比了动态磁场处理和直接排布方法制备的样品。实验结果显示,在各磁场强度和各磁含量条件下,动态磁场处理均使排布率出现显著提升。对于15wt%样品,动态磁场处理可获得12.75 A·m²/kg的初始剩磁。实验人员还进行了悬臂梁驱动实验,如图2所示,直接印证了动态磁处理带来的剩磁提升效果。
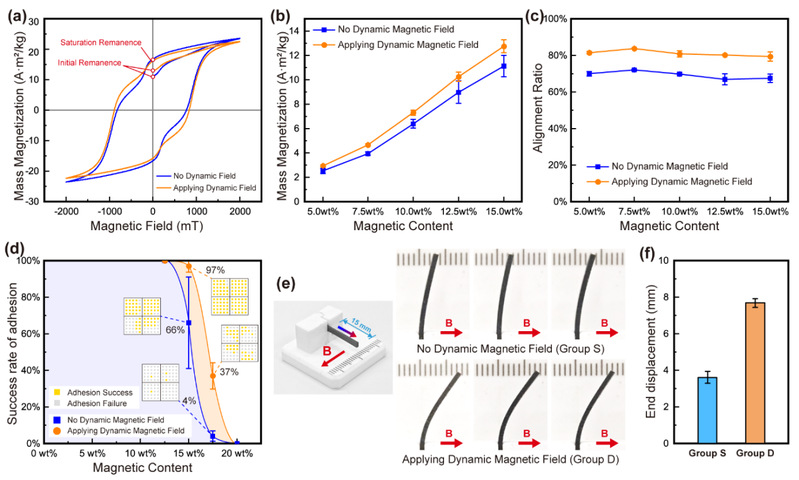
图2 剩磁强度提升
3. 结构制造均匀性提升
动态磁场的应用还显著解决了MFA-DLP方法中因连续迭代“排布-固化”循环而诱发的颗粒累积性聚集难题。在同一层内进行多次连续排布时,使用直接排布方法时材料内的磁颗粒随磁排布次数增加呈现显著的局部不均匀性,而动态组则展现出优秀的分布均匀度。在跨层连续成形方面,使用直接排布方法制作需经过80次磁场反转的网格时出现了明显的结构缺陷,而动态磁场辅助方法则确保了结构完整性。为了定量研究材料均匀性的提升,研究人员设计了一体成形八个方向样品的结构,每个样品对应不同的磁取向方向。在直接排布和动态磁场辅助条件下制作样品并进行剩磁角度扫描。如图3所示,动态组具有更好的一致性,平均剩磁也更高。由此可见,动态磁场通过分散磁颗粒,大幅提升了层内多方向排布及连续多层打印的可靠性与功能一致性。
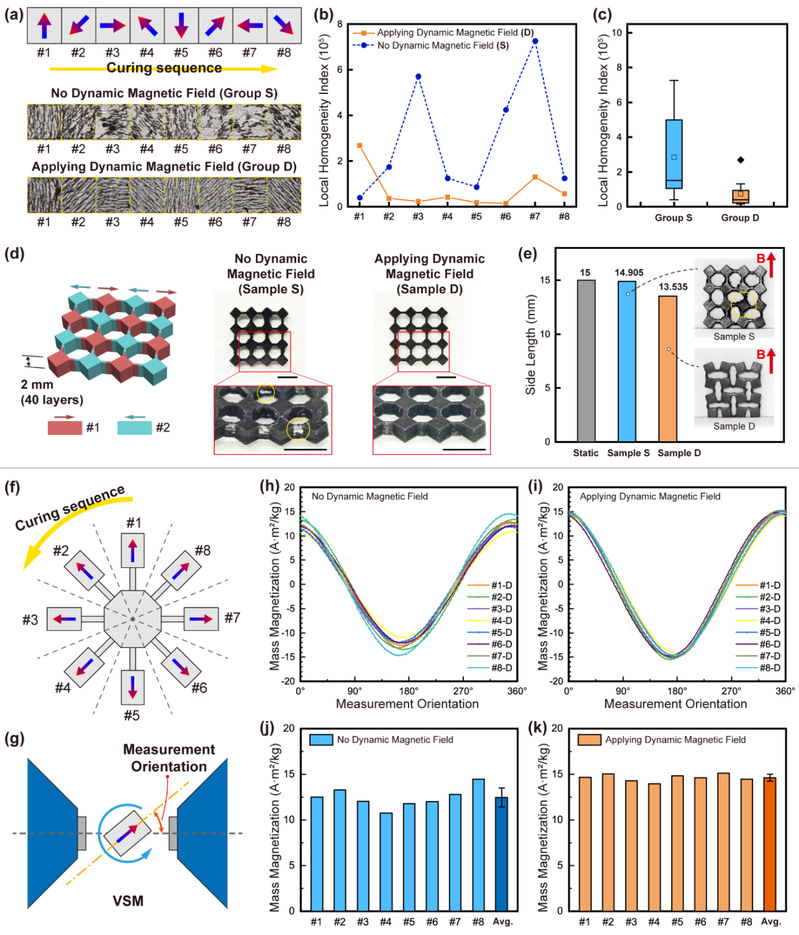
图3 均匀性提升
4.具有复杂形貌/排布的磁功能结构成形与应用
为验证本方法的先进制备能力,研究人员制备了一系列具有复杂磁排列结构的样品,如图4所示。磁场相机成像下,各样品边界显示清晰,均完美实现了预期排列。其中研究人员制作了一个多极磁环,将24个磁极沿径向在环上交替排列,单个磁极面积约1mm2。研究人员还成功制备了一系列具有复杂磁排布的驱动结构,它们充分展示了磁场动态辅助方法的优势和巨大潜力。
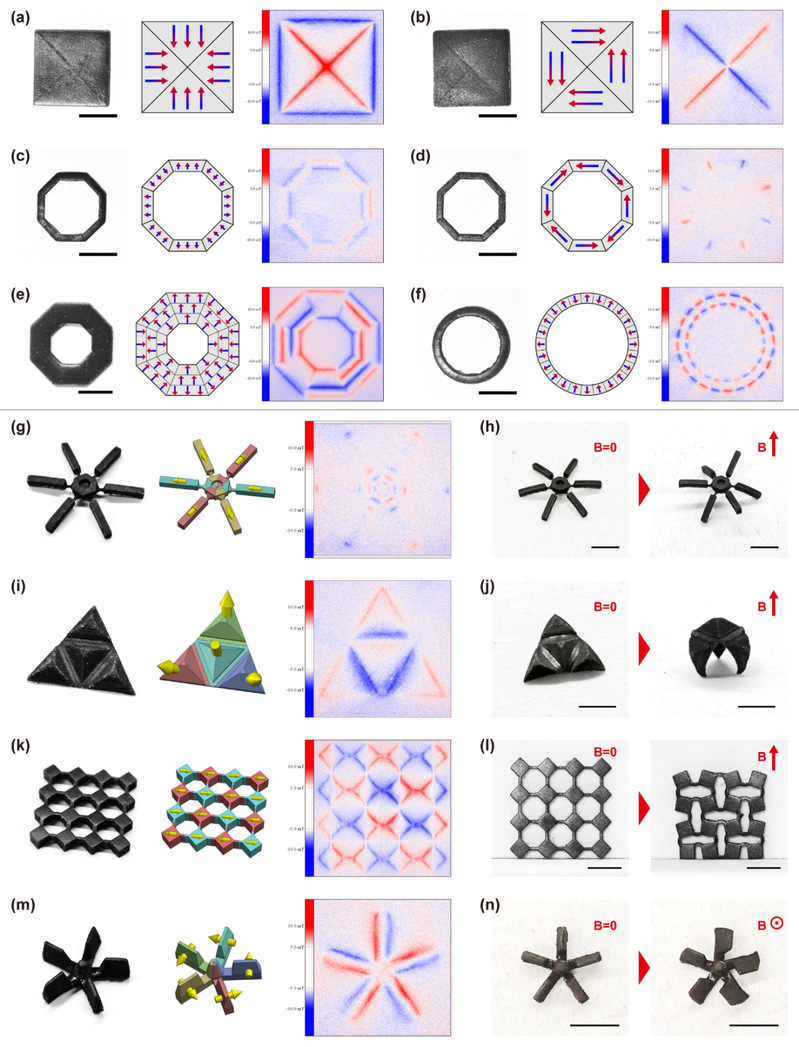
图4 复杂结构与磁性排列的样本展示
(1)多维力-磁解耦的磁功能结构
在高性能磁传感器制造中,实现特定的磁排布至关重要。本团队之前的工作中曾提出一种三维力解耦传感器,由柔性磁膜、硅胶支撑层和霍尔传感器构成。其功能核心正是具有有向心排列磁化结构的方形薄膜,如图5所示,使传感器具备了快速三维解耦能力。然而,在更小的尺度下,原有的折叠充磁方法将难以操作。而利用动态磁场辅助DLP工艺,研究人员得以直接制成具有这种特定磁排布结构的微型磁性薄膜(10mm边长),成功将该传感器小型化。
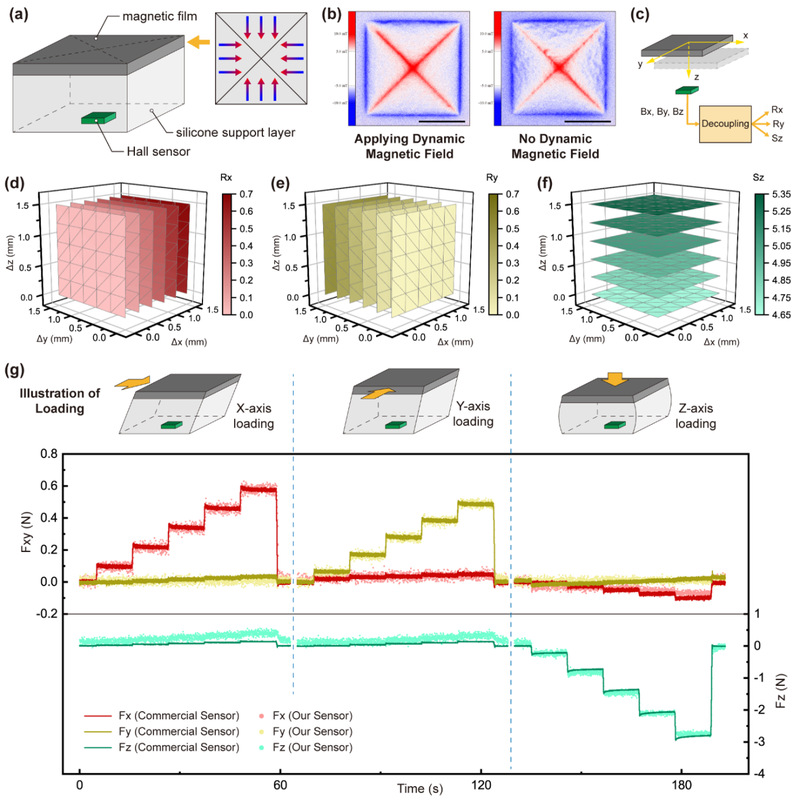
图5 磁性薄膜触觉传感器及性能展示
(2)二进制编码磁极定位盘
受光栅传感器原理启发,研究人员设计了一个八方向三层环结构,如图6所示,分别用向内和向外的磁化方向编码二进制信号(0和1)。从定位盘中心向外移动,扫描路径上的磁场分布获得一条特征曲线,通过分析曲线增减性即可解码磁化排布顺序,从而定位移动方向。
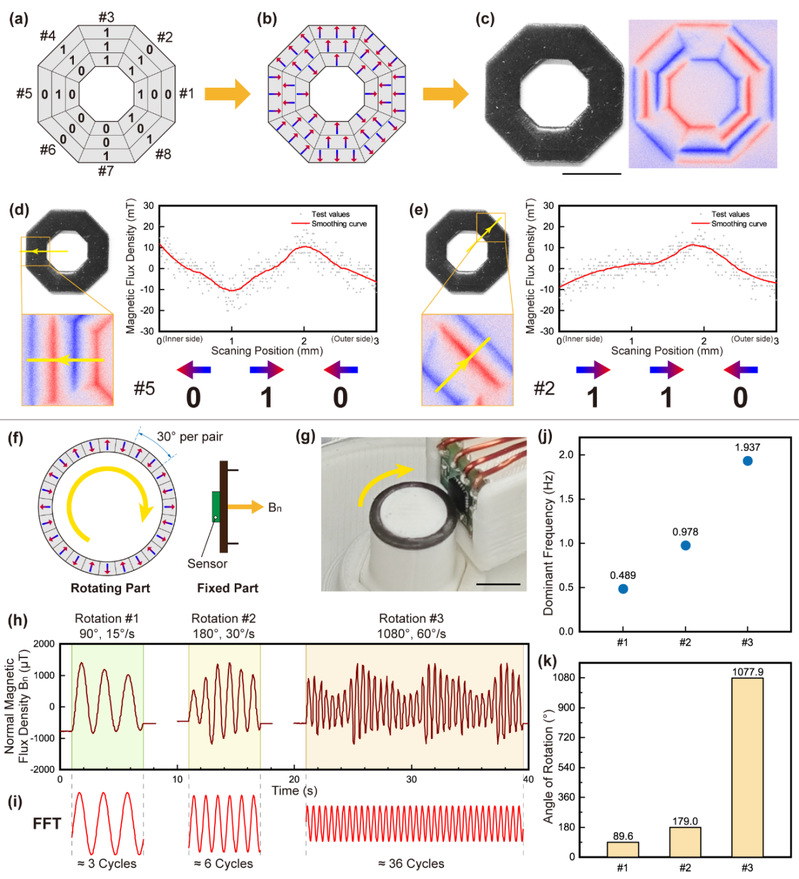
图6 八向磁性定位盘
(3)高密多极磁角度传感器
前文中展示了一个24向磁环,将其安装在转轴上,并在旁边放置一个固定的霍尔传感器,就形成了一个角度传感器。在旋转过程中,传感器会采集正弦形信号,每个完整周期对应一对方向相反的磁极(对应30°旋转角度),通过计数完整信号周期数即可快速确定大致旋转角度。另外,也可采用快速傅里叶变换(FFT)分析提取主频分量并重构特征波形,可以获取转速信息,进而计算更精细的转动角度。如图7所示。
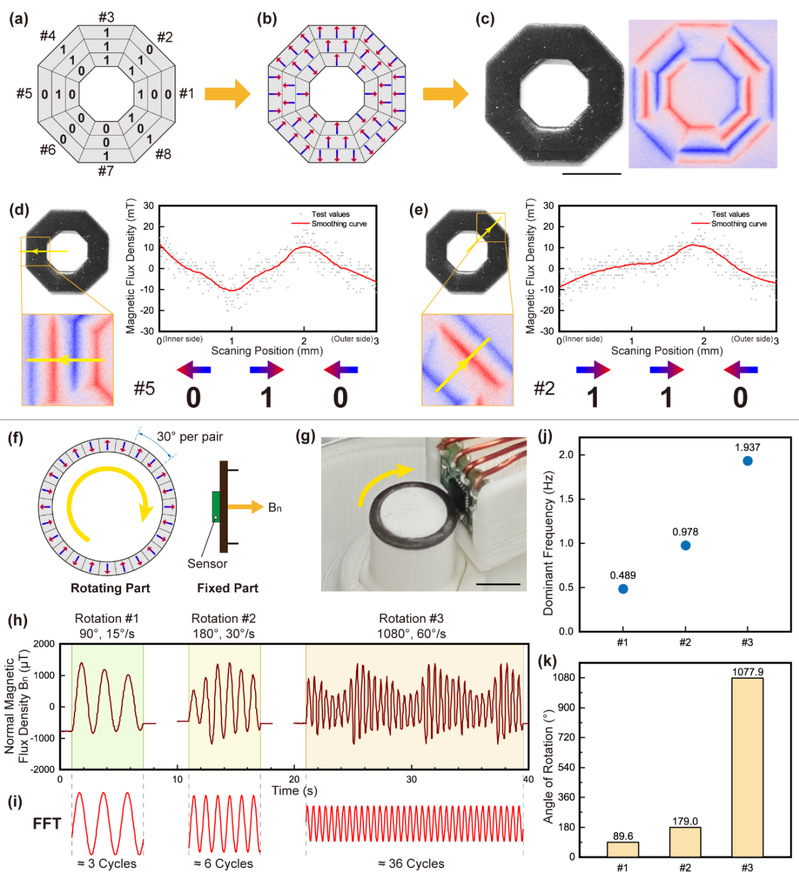
图7 旋转编码器
5.总结
研究人员提出了一种动态磁场辅助DLP方法,实现剩磁增强、多层打印可靠性提升,并具备了多方向排布结构制造能力。设计并制作了具有复杂结构与磁排布的磁功能软材料,验证了该方法的可行性。最后,展示了采用该方法制备的磁功能软材料在传感领域的应用潜力。该方法进一步扩大了磁性功能软材料在结构和磁化取向设计上的自由度,为提升其功能性和拓展应用领域奠定了重要基础。这种制造方法将推动磁性功能材料研究在驱动、传感等领域的边界拓展。
■ 课题组介绍 ■
该工作是团队近期关于磁功能器件形性一体化制造相关研究的最新进展之一。近年来,磁功能器件因其响应快、无线传输的特性受到了广泛关注。在磁驱动应用领域,基于立体折叠的双稳态结构与磁化设计,团队设计制造了一种能弹跳超过自身高度108倍、具有数十毫秒级超快响应速度的双稳态弹跳磁软体机器人(Science Robotics, 2024, 10.1126/scirobotics.adm8484)。在磁传感应用领域,团队还从理论上证明了一种全新的三维解耦磁化结构设计,并以此为基础开发了三维力解耦触觉感知功能器件(Advanced Materials, 2024, 10.1002/adma.202310145)。在制造技术方面,团队在之前的工作中搭建了一套磁场辅助光固化设备,并对柔性致动器进行了凹槽结构设计以强化其驱动表现(Additive Manufacturing, 2024, 10.1016/j.addma.2024.103979)。此外,团队进行了磁颗粒操控的研究(Materials and Design, 2024, 10.1016/j.matdes.2023.112588),也为后续高性能磁功能器件精密制造与应用奠定了良好基础。
文章信息:
H.Sun, C.Zhang, Z.Hu, et al. “Dynamic Magnetic Alignment Boosts Remanence and Fabrication Reliability in DLP Manufacturing of Magnetic Functional Materials.” Advanced Materials (2026): e19123.
https://doi.org/10.1002/adma.202519123