
人类美好的情感是相通的——这是看到学生拍摄的这张照片后我最真实的感动。
Science Advances 当期封面
▼
抓取操作极大地扩展了无人机(Unmanned Aerial Vehicle, UAV)的能力,但是现有的用于无人机抓取操作的抓手存在着适应性差、控制复杂、重量大等问题,严重限制了无人机的操作能力。近期,浙江大学机械工程学院邹俊课题组在该方向取得重要进展,课题组在前期研究的基础上——流体动力柔性驱动(Tang,...,Zou*. Nature Communications, 2021;Tang,...,Zou*. Science Advances, 2021;Tang,...,Zou*. Nature Communications, 2023),液气相变驱动(Zhong#, Tang#,...,Zou*. Nano Energy, 2022;Zhong, Tang*,...,Zou*. National Science Review, 2023),无人机飞行控制(Qin#, Tang#,...,Zou*. Advanced Intelligent Systems, 2023)——开展学科交叉研究,研制出一类仿藤蔓形式的、自适应的、一体化自包含的柔性抓手,用于无人机操作,为无人机在低定位精度、无复杂抓取规划环境下的操作提供了新的思路。
国际知名学术期刊Science Advances采用封面论文的形式,报道了来自流体动力基础件与机电系统全国重点实验室这一最新研究成果“Powerful UAV manipulation via bioinspired self-adaptive soft self-contained gripper”。论文全部作者均来自杨华勇院士团队,博士生郭欣雨为论文第一作者,唐威博士和邹俊教授为论文通讯作者。
研究背景
空中抓取极大扩展了无人机的操作能力,但是目前用于无人机刚性抓手极度依赖于精确的模型、传感器反馈以及无人机的高精度控制,这无疑增大了无人机的操作难度。随着软体机器人的兴起,软体抓手被用于无人机的抓取,由于软材料的顺应性,抓手的控制难度有所降低。但是大部分软体抓手的外形仍然像刚性抓手一样,无法实现形状自适应的抓取,如难以实现盆栽这种难度极大的抓取。通过阵列灯丝状的软执行器,一种基于纠缠抓取的软抓手被提出以提高抓取的适应性,但是抓取具有随机性,并且需要体积庞大且笨重的气泵组来单独驱动每一根执行器,这进一步阻碍了他们在无人机领域使用的可能性,由于无人机有限的空间和负载。
受藤蔓植物启发的自适应柔性抓手
在自然界中,藤蔓植物能够依靠外部支撑来垂直生长和增强采光。藤蔓植物在开始生长时,能够依靠自身的缠绕紧紧地将周围的茎干和树枝抓住。在达尔文关于攀援植物习性的论文中,这类藤蔓植物被形容是一种极好的抓手,藤蔓紧紧抓住树枝就像鸟儿栖息在树枝上一样,这种藤蔓称之为藤攀爬者。还有另外一类藤蔓植物,他们的表面上具有钩子一样的结构,能够与支持物体形成互锁,以此来支撑自身的重量实现攀爬,这种藤蔓称之为钩攀爬者。
受藤蔓植物的启发,我们提出了一类自适应的柔性自包含抓手,可以实现无人机在多种环境下各种尺度、各种形状的抓取(视频1)。我们首先设计出两种长管状的柔性偏心圆管执行器,一种表面光滑类似于藤攀爬者,另一种具有表面结构类似于钩攀爬者。然后,我们分别将两种长管状的柔性偏心圆管执行器两端固定成为U形,制造出两种U形柔性偏心圆管执行器(U-shaped soft eccentric circular tube actuators, UCTA),多根UCTA交叉布置组成了两类柔性抓手。两类抓手都能够通电卷曲自适应物体的外形,对物体形成缠绕而实现抓取。
表面光滑的抓手在变形后具有较大的曲率,能够更好地适应物体的外形,适合用于精巧的抓取,例如抓取花朵。而具有表面结构的抓手变形后的曲率相对较小,抓取适应性减弱。但是抓手的负载能力有所提升,由于变形后凸出的表面结构能够和物体形成互锁,这种抓手适合用于抓取重物,例如抓取沉重的石头(图1)。此外,U形设计解决了前述灯丝状执行器抓取随机性的问题,并且赋予了无人机直接通过勾、挂等简单方式抓取物体的能力。与现有的部署在无人机上的抓手相比,我们的柔性自包含抓手在重量、负载、尺寸、响应时间、适应性和位置误差方面均具有优越性。
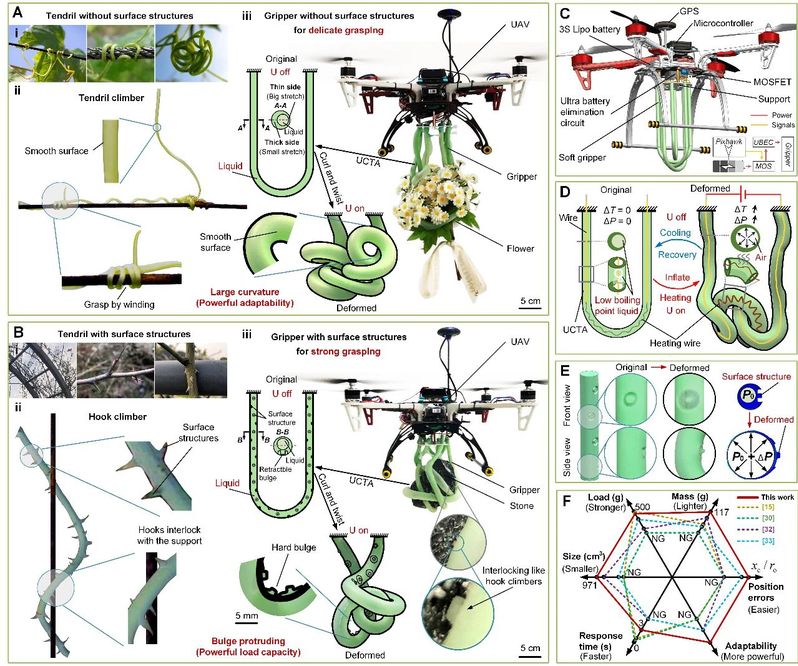
图1. 柔性抓手的仿生设计策略以及液气相变驱动的变形原理

视频1. 无人机抓取不同形状和大小的物体
液气相变驱动的自包含系统
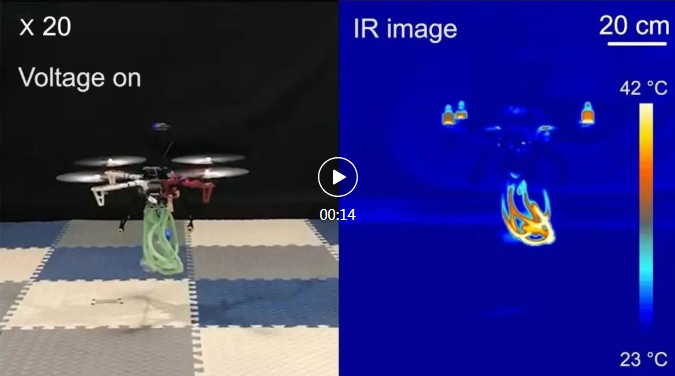
我们在UCTA内部装入适量的低沸点液体(Novec 7000)和软的电阻丝,形成了一个电驱动的自包含系统,避免了对一组笨重的气动泵的需求,使得抓手能够与负载能力有限的无人机集成。通过给UCTA内部的电阻丝通电加热,执行器中的低沸点液体由液态转变为气态,即液气相变的过程,执行器内部压强增大,产生类似藤蔓的缠绕变形(图1,图2,视频2)。
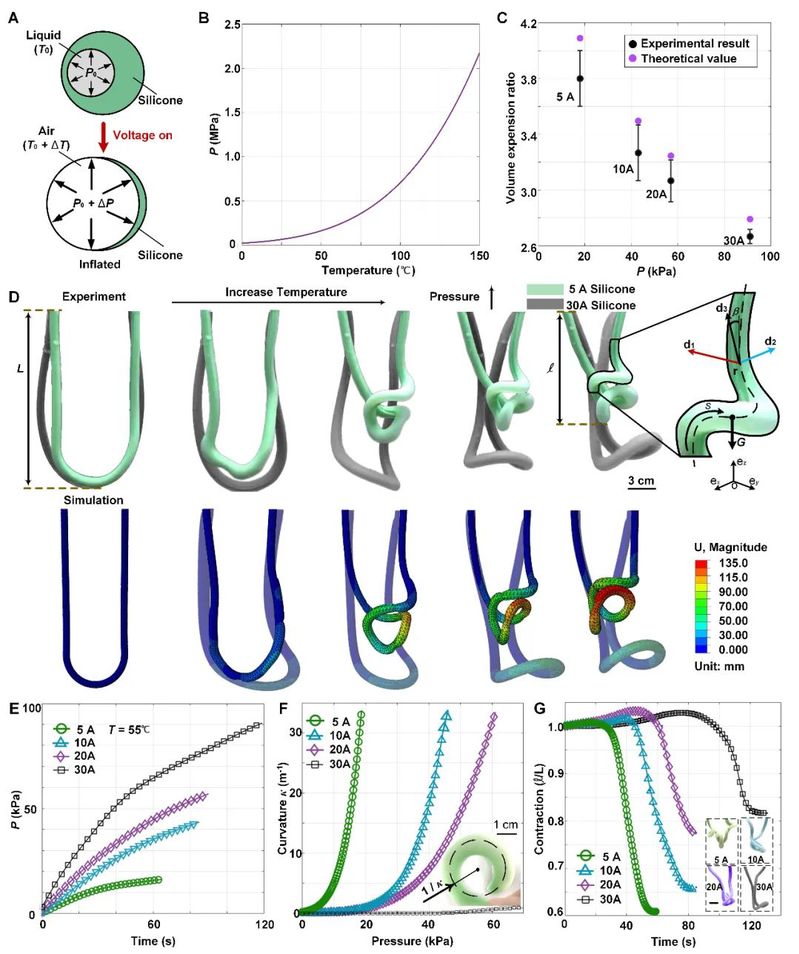
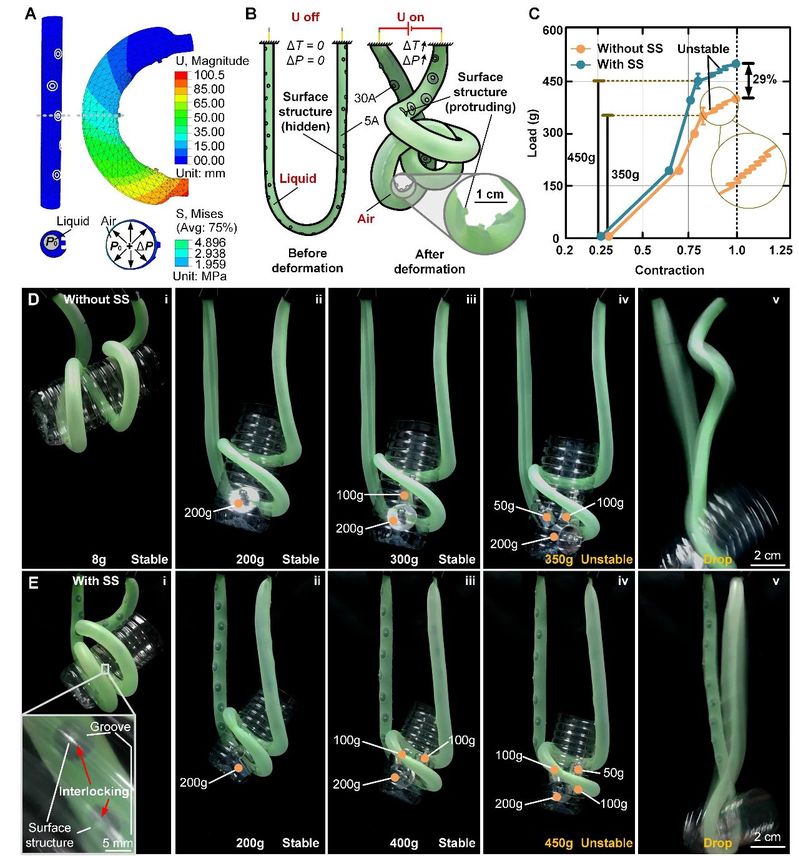
图2. 表面光滑的U形柔性执行器的理论分析以及性能测试及仿真
视频2. 液气相变驱动UCTA的变形过程
具有表面结构的U形柔性执行器
受钩攀爬者的启发,我们设计了带有表面结构的UCTA。当UCTA内部气压增大时,其表面类似钩子的凸起凸出,这些凸起使用更硬的30A硅橡胶制作,能够嵌入被抓取物体表面的沟壑中,像钩攀爬者一样与物体形成互锁,提高UCTA能够缠绕抓取的最大质量;当UCTA内部气压下降时,表面的这些凸起能够缩回,确保能够释放物体。
我们通过一组对照实验展示表面结构在提高UCTA负载方面的有效性,两种UCTA均缠绕在表面具有沟壑的透明塑料杯上,不断向杯中加入砝码,直至整个系统失稳,结果表明,没有表面结构的单根UCTA能够抓取的最大质量约为350g,具有表面结构的单根UCTA能够抓取的最大质量约为450g,负载能力提升了29%(图3)。
液气相变驱动过程的变形及温度分析
红外相机拍摄的执行器变形和复原的整个过程(图4,视频3,视频4,视频5)显示,自包含柔性抓手与无人机的结合,是相互拟补的过程,即无人机的晃动加快抓手的驱动速度,而柔性抓手扩展无人机的操作能力。
在实践中,我们首先预热以诱导部分低沸点液体的相变,从而产生内部预压力,该预压力不会使抓手收紧,但会使抓取时间缩短至3秒。但是采用该方法时,夹持器发生局部变形,对抓取物体的形状会带来一定的限制。
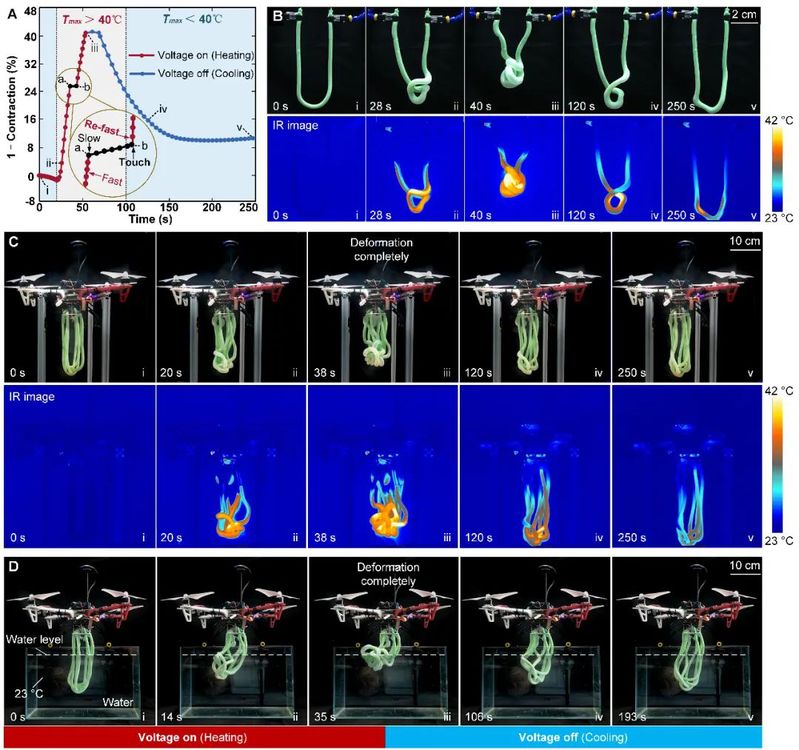
图4. U形执行器及自包含抓手的变形过程和温度变化
视频3. 液气相变驱动抓手的变形过程
视频4. 无人机抓取和释放物体的过程

室内抓取实验
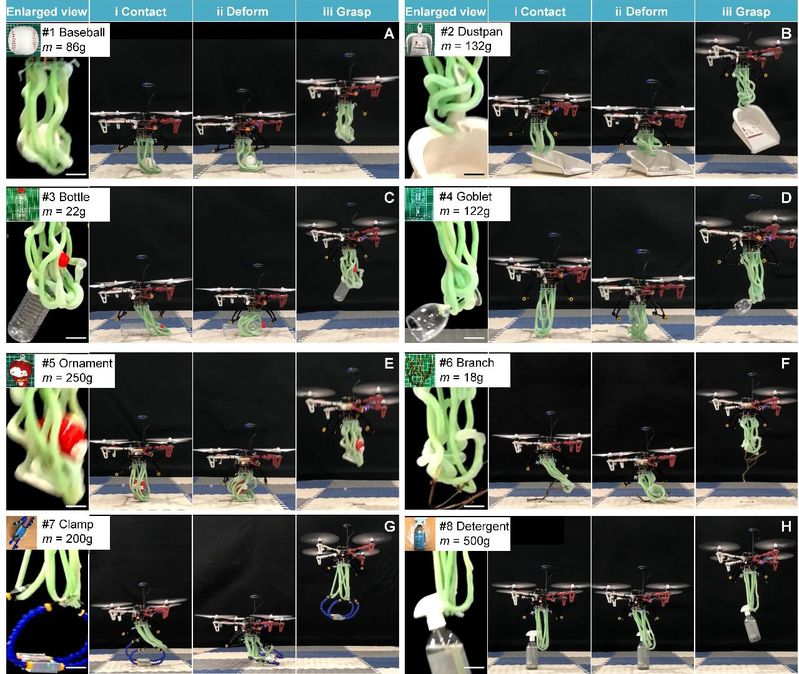
无人机对一系列物体的成功抓取演示,包括规则的球体、簸箕、塑料瓶、高脚杯、陶瓷摆件、树枝、夹具和清洁剂瓶子,验证了无人机具有强大的抓取能力(图5,视频1)。
抓手的实际应用
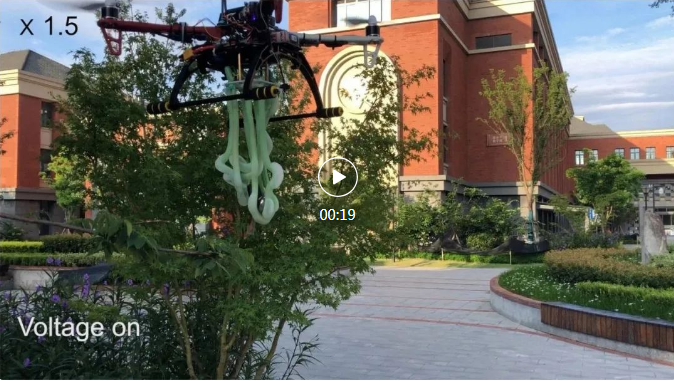
为了展现抓手在实际应用中的能力,我们在无人机抓手本身没有感知、规划和反馈的情况下,在户外进行实验演示。我们使用无人机抓取了挂在树枝上的钥匙。自适应的抓手能够穿过树枝并首先通过勾挂抓取的模式取下钥匙,之后抓手通电膨胀夹紧钥匙(图6,视频6)。
我们使用无人机打捞了在水中自由移动的树枝。交叉排列的U形柔性驱动器可以钩住物体以限制其进一步的运动,然后再膨胀变形完成抓取。这对于其他抓手是困难的,因为水的视觉障碍和螺旋桨气流的干扰会极大地阻碍抓取。户外抓取的展示表明:柔性抓手能够应用在多种具有挑战性的环境中,并且拥有独特的优势,使无人机在低定位精度、无复杂抓取规划下的自适应、多环境抓取成为了可能(图6,视频7)。
最后,我们设计了两架无人机协作搬运物体的实验。柔性抓手在协同搬运中具有优势,不同于刚性抓手抓取物体时形成的硬约束,柔软、稀疏的自适应抓手不仅能够吸收无人机传递的震动,而且允许物体在抓手中旋转或移动(图6,视频8)。


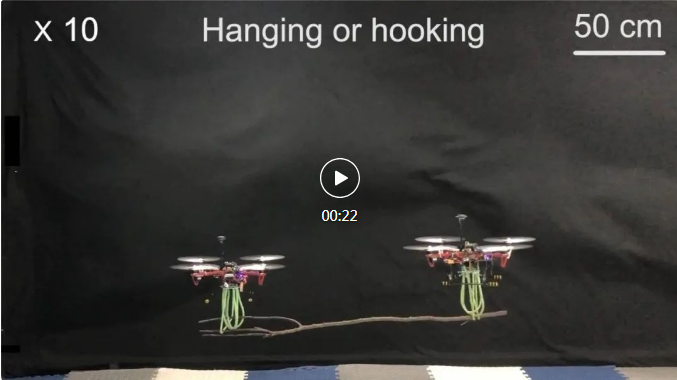
视频8. 两架无人机协作抓取一根大树枝
总结
提出了一类受藤蔓启发的柔性抓手,抓手结构紧凑、重量轻且易于控制,并且具有强大的适应性以实现无人机在多种环境下对各种尺度、各种形状物体的抓取操作。
使用液气相变驱动的方法,使柔性抓手成为了独立的自包含系统,避免了对笨重的气泵的需求,使得抓手能够与负载能力有限的无人机集成。
通过无人机室内抓取不同的物体以及室外不同环境的应用展示,证明了柔性抓手拥有独特的优势,使无人机在低定位精度、无复杂抓取规划下的自适应、多环境抓取成为了可能。
原文链接(点击文末左下角阅读原文可直接跳转):
https://doi.org/10.1126/sciadv.adn6642