

生物进化产生了具有多种感知功能的感觉器官,使其能够感知环境信息和追捕猎物,从而提高在各种环境下的生存能力。其中,对多维度机械力的触觉感知能力使人类等动物可以完成复杂的操作任务,因此,各种各样的仿生触觉传感器在柔性电子、人机交互和人工智能等领域得到应用。近年来,基于磁场的触觉传感器仅靠单传感器就实现了多维度力感知,其发展潜力得到了广泛关注,但现有研究也只能实现二维解耦感知或者是依靠大量的标定和机器学习实现三维力感知,装配过程中的微小偏移即会失效,限制了磁触觉传感器的应用拓展。
针对上述问题,浙江大学赵朋教授、张承谦博士课题组报道了一种具有三维力解耦感知能力的磁触觉传感器。通过建立三维力-磁场解耦理论模型,开发了高稳定的柔性磁体向心磁化设计与折叠充磁方法,使得该磁触觉传感器仅依靠单霍尔传感器即可实现对三轴力的解耦感知。该工作还充分利用磁场无线传输的特点对传感器进行了分体式设计,并开展了水下流速感知的拓展应用,展示了在封闭或者密封性要求极高的环境下实现流场感知的应用优势。相关研究成果以“Split-type magnetic soft tactile sensor with three-dimensional force decoupling”为题发表在《Advanced Materials》上并入选了当期彩页推荐(Frontispiece),浙江大学机械工程学院赵朋教授和交叉力学中心张承谦博士为论文共同通讯作者,硕士生戴煌哲和张承谦博士为论文共同第一作者,论文作者团队成员均来自浙江大学流体动力基础件与机电系统全国重点实验室。
本文传感器的基本结构如图1a所示,与皮肤和鱼类侧线的分层结构一致,磁触觉传感器也分为磁膜、柔性层和霍尔传感器三层。具有向心磁化设计的磁膜是传感器的关键组成部分,也是实现三维解耦的结构基础,由钕铁硼(NdFeB)硬磁颗粒和弹性体基质组成(图1b),通过折叠成箭簇状在线圈中实现向心磁化,其下方的磁场分布(图1c和d)可与所提出的三维解耦理论结果保持一致。磁场三维结构理论模型在文章补充材料中有详细论述。最终传感器可以实现如图1e所示的三维力解耦精确感知。
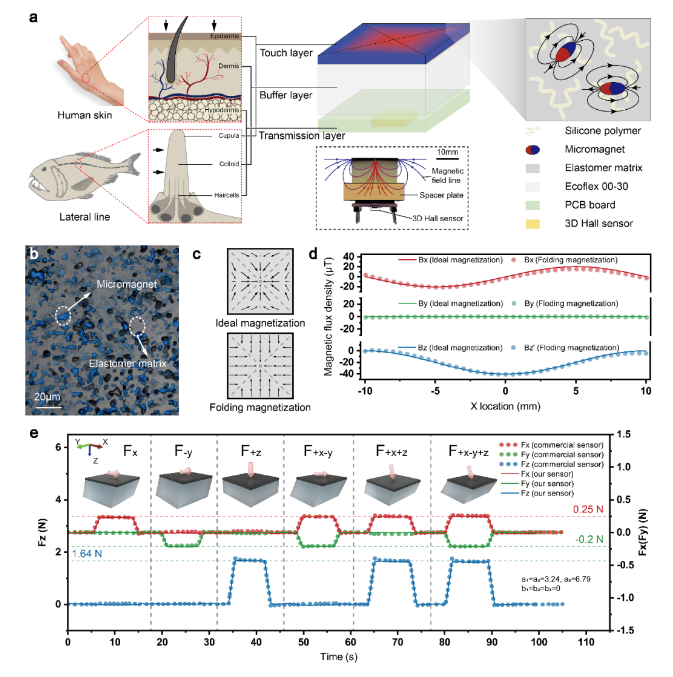
图1 传感器的基本结构和功能
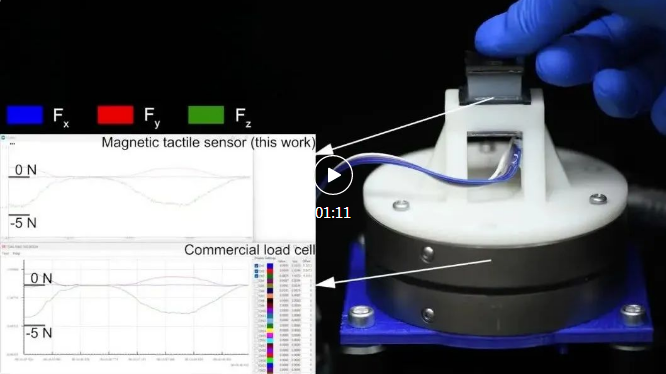
传感器的解耦原理与具有不同刚度基底的传感器的标定结果如图2所示,传感器所产生的三维磁场信号通过解耦模型解耦为三个解耦参数Rx、Ry和Sz,每个解耦参数仅随其所在轴的磁膜位移变化而产生变化,不受磁膜其他轴位移的影响因此相互独立,例如解耦参数Rx仅随磁膜的x轴位移变化而变化,磁膜的y轴位移和z轴位移不影响Rx值的大小。所以三轴解耦参数分别与磁膜三轴位移独立相关,也即与传感器所受三轴力独立相关。在进行基底的力-位移标定(图2g、h、i)后,传感器即可实现三维力的解耦感知,如视频1所示,三维力解耦感知能力媲美商用的多传感单元集成的三维传感器。
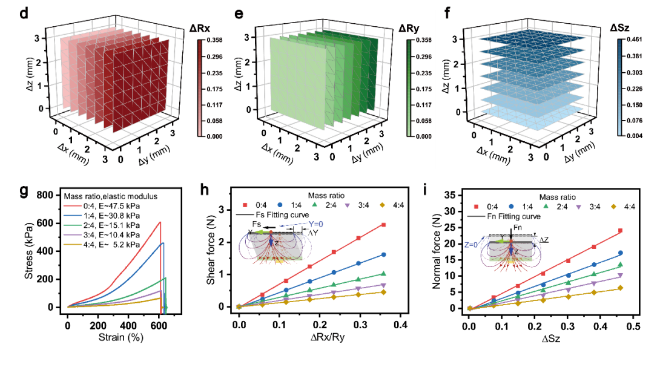
图2 传感器解耦原理与不同基底的磁-力标定
团队将传感器集成在二指机械手上(图3c和d),通过感知抓握对象带来的剪切力来调整机械手抓握力的大小,从而使机械手可以自适应抓握质量变化的物体或者自适应外界的干扰力,抓握力在不至于太小使物体滑落的同时抓握力不至于太大损伤抓握对象,展示了三轴力感知在自适应抓握方面的应用。另外,团队也尝试了人机接口的应用(图3e和f),将传感器作为可以感知三维力的线性摇杆,将手指的作用力实时映射为机器人的运动速度和机械臂的动作,遥控机器人实现物体搬运的任务。
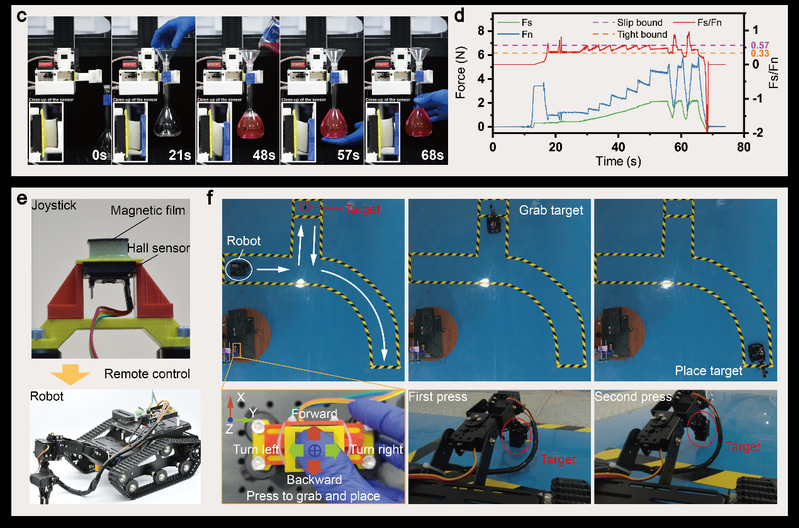
图3 自适应抓握与摇杆操控应用
磁触觉传感器的另一个优势是其磁场信号无线传输的特点,团队针对这一特点拓展了传感器的应用范围,将其用于封闭环境和水下流场信息的感知。如图4a和b所示,仿照鱼类侧线的基本结构特化了传感器的剪切感知能力(约38倍),在优化栅格结构后(图4c)实现了管道内的流速测量(图4d和e)。
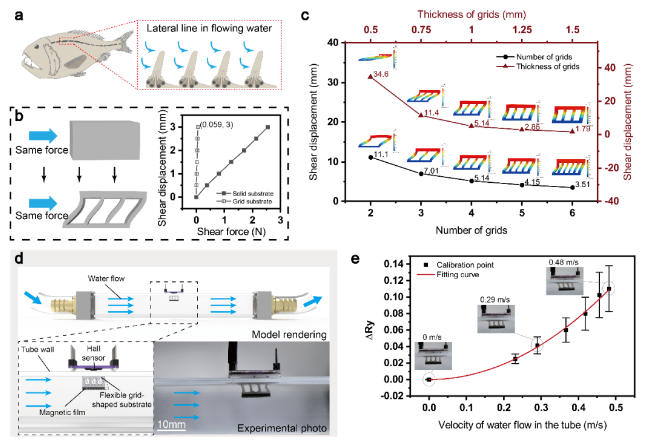
图4 剪切感知特化实现流速感知
最后,团队将传感器分体式集成在小船底部,无需任何穿孔引线的步骤,将传感器的流速感知能力和三维地磁场的感知能力结合,实现船只运动位移和方向的感知计算(图5)。遥控小船在水中按“ZJU”的路线移动,根据传感器的信号即可计算得到小船的运动轨迹,从而实现小船在一定空间范围内的“导航”(视频2)。
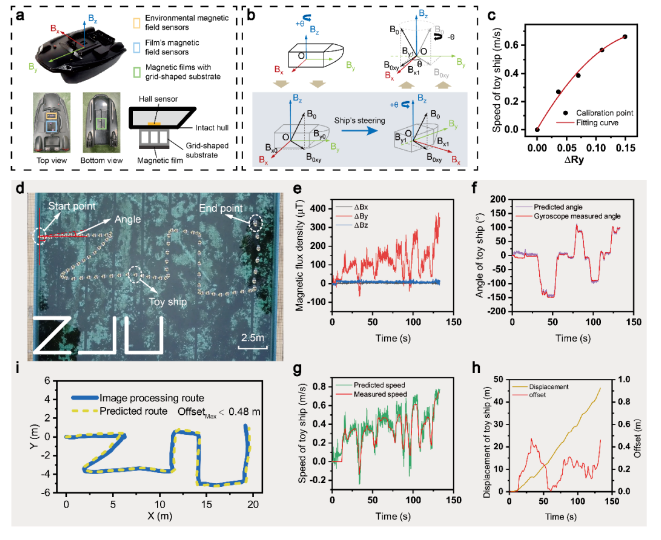
图5 流速测量的导航应用
综上,该论文报道了一种具有三维力解耦感知能力的磁触觉传感器,通过建立三维解耦理论模型、开发向心充磁方式实现了三轴解耦的力触觉感知,并利用磁传感无线传输的特点实现传感器的分体式流速感知与导航应用。该传感方案使触觉传感器具有媲美人类皮肤的感知维度,解耦方法使得即使磁体在装配过程中发生偏移依旧无需对传感器进行重新标定,大大提高其批量生产与应用的能力,而且,充分展示了其在机器人仿人触觉感知、人机交互等领域以及深海极端环境下流场感知的应用潜力。
该工作是团队近期关于磁性功能器件设计与成形制造相关研究的最新进展之一,得到了国家自然科学基金、国家重点研发计划、浙江省自然科学基金等项目的大力支持。近年来,磁功能器件因其响应快、无线传输的特性受到了广泛关注,团队采用折纸工艺制备了柔性磁驱动功能器件(Nano Energy, 2021, 89, 106424.),实现了二维结构向三维结构的形态转变以及单功能向多功能的驱动转变。随后,团队利用磁化设计方法结合空间磁场分布建模,制备了大面积柔性触觉功能器件(ACS Nano, 2022, 16 (11), 19271-19280.),依靠单磁传感器实现了大面积力-位置感知。团队在磁场辅助增材制造磁功能器件方面的工作(Adv. Funct. Mater., 2021, 31 (34), 2102777、Mater. Design, 2023, 112588.)也为后续高性能磁功能器件的形性一体化制造奠定了良好基础。
原文链接:
https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202310145