
小小的昆虫,身体小而轻,具有在小空间内敏捷快速移动的能力,类似昆虫的软体机器人可以在探索、救援等许多场景中进行应用。然而,设计和批量制造昆虫大小、快速移动、良好的鲁棒性和碰撞感知能力的类昆虫机器人仍然有巨大的挑战。
近期,宁夏大学冒杰与浙江大学罗英武及贺永团队合作开发了一种3D打印的可高频响应人造肌肉,并利用该人造肌肉,设计和制造了一种昆虫大小的软体机器人。整个机器人仅15mm,比硬币小,重量仅450毫克,能够超快移动(4个体长每秒,已报道介电弹性体驱动机器人中爬行最快)。该机器人可以在各种场地和复杂的路径上奔跑,在小管道内攀爬,可以实现机器人群体同时工作,并可以承受和感知反复的冲击,展示出较高的鲁棒性、良好的环境适应性和冲击感知能力。相关研究结果以“3D-Printed High-Frequency Dielectric Elastomer Actuator toward Insect-Scale Ultrafast Soft Robot”为题,发表于《ACS Materials Letters》杂志上,第一作者为朱元波硕士,共同通讯作者为宁夏大学化工学院的冒杰副教授、浙江大学化工学院的罗英武教授及机械学院的贺永教授。
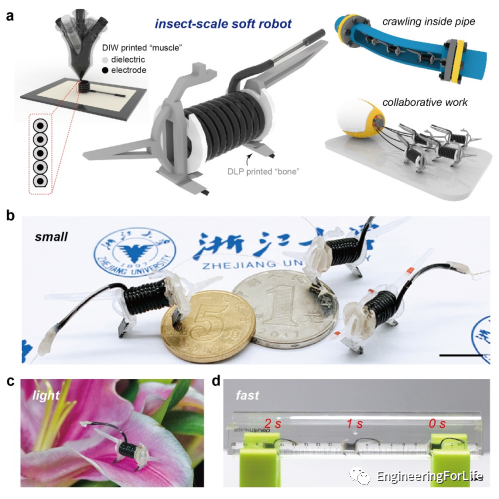
图1 3D打印微型快速爬行机器人
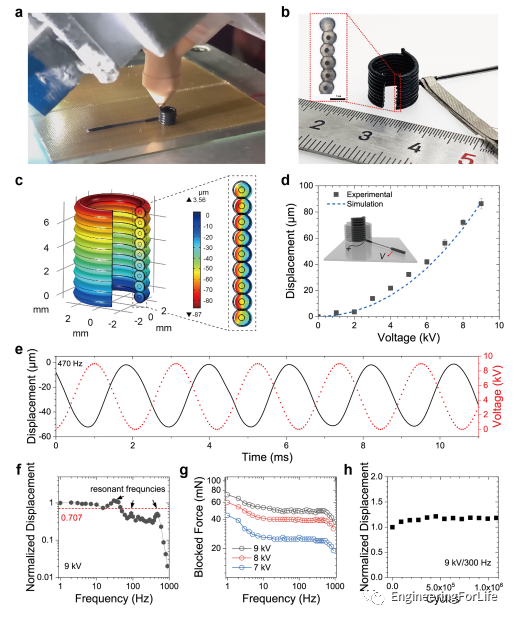
图2 线圈状介电弹性体驱动器性能
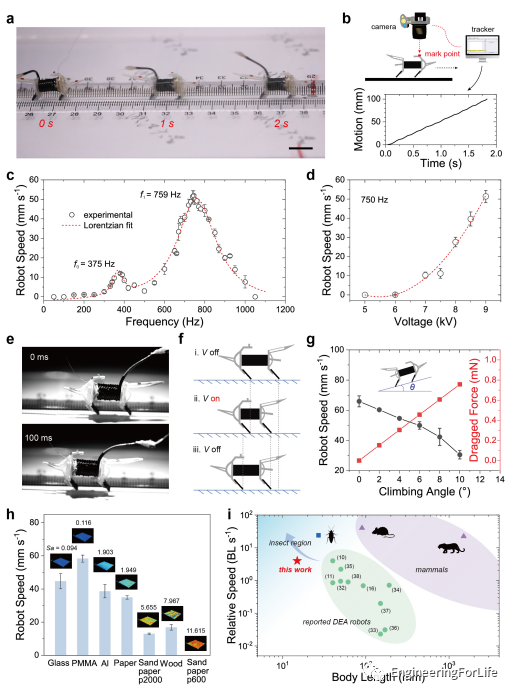
图3 机器人运动性能
该机器人可在驱动状态下受到外部挤压而不损毁,并可快速恢复前进功能。在受到挤压时,机器人驱动器还可通过电流变化展示出其自感知能力。
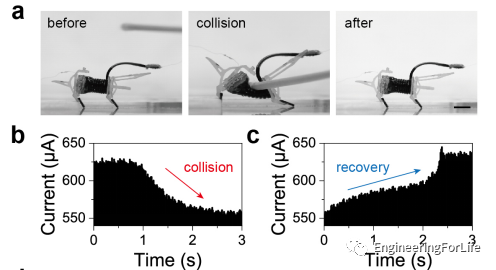
图4 机器人的鲁棒性和自感知能力
入群交流
围绕再生医学,EFL建有“学术交流群”、“产业交流群”,扫描下方二维码加小编微信即可入群交流~
