
8月24至26日,以“人机共生,赋能未来”为主题的“申昊杯”第四届中国研究生机器人创新设计大赛总决赛在浙江杭州举行。

机器人大赛正式开始
浙江大学团队表现优异,斩获全国特等奖1项,全国一等奖3项,全国二等奖4项,同时获得“优秀组织奖”荣誉称号。
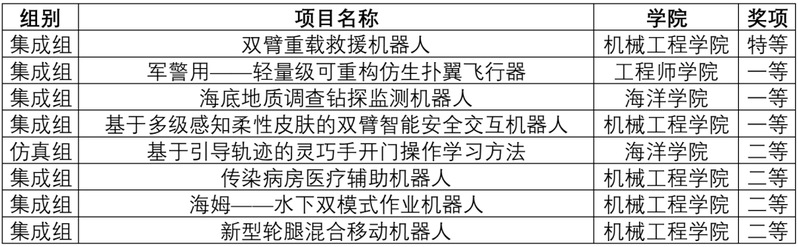
浙江大学获奖名单

特等奖获奖团队

优秀组织单位领奖
“申昊杯”第四届中国研究生机器人创新设计大赛,由教育部学位与研究生教育司指导,中国学位与研究生教育学会、中国科协青少年科技中心主办。由浙江大学承办,浙江大学机械工程学院、流体动力与机电系统国家重点实验室、国家电液控制工程技术研究中心提供技术支持。
大赛共收到来自174所高校和科研院所的884支队伍参与报名,经线上专家初评,最终有来自清华大学、浙江大学、北京理工大学、哈尔滨工业大学等88所高校和科研院所的201支队伍进入总决赛。经过现场展示和评审答辩,浙江大学机械学院、海洋学院、工程师学院均斩获了优异成绩。


获奖选手领奖
中国研究生机器人创新设计大赛是“中国研究生创新实践系列大赛”之一,也是目前国内层次最高、规模最大、影响最广泛的全国性研究生学科竞赛之一,旨在引导广大高校学生积极投身“大众创业,万众创新”的时代潮流,提升研究生创新创业意识,培养研究生设计能力,推动机器人科技创新发展,使机器人科技及其产品更好地推动经济发展和造福人民。
特等奖项目介绍
双臂重载救援机器人团队

团队成员:纵怀志、贾睿亨、方李舟、张付、沈俊
指导老师:徐兵、张军辉
项目简介:突发灾难下的快速应急、施救成为国家公共安全领域的核心任务,该参赛作品是面向救援环境的双臂重载救援机器人。从自研的“重量轻,测得准”的液压元件着手,进行七自由度冗余机械臂的轻量化设计和制造,配合三角履带底盘,机器人实现了多地形通过,其作业半径2米,末端负载1吨。作品提出的“结构-驱动”闭链液压关节分解建模与辨识方法,解决了控制精度低的问题,控制误差在4.3 mm以内;提出的基于能量最优的动态规划方法,解决了能量效率低的问题,对比梯度投影法和最小缸速法,负载敏感系统下多节能29.89%。作品基于局部加权意图预测的人机共享控制方法,解决了操作难度大的问题,较传统主从控制方法,同一任务下的碰撞次数降低64.3%,任务完成时间缩短了25.5%。
一等奖项目介绍
军警用——轻量级可重构仿生扑翼飞行器团队

团队成员:沈启迪、杨泓奕、李佩宜、孙吉页、杨辉凡
指导老师:黄晓艳、胡松钰
项目简介:团队成员自主研制了一款具有仿生学意义的轻量级、可拆卸的扑翼飞行器。扑翼飞行器机身使用镂空设计结构,并采用三元共聚物ABS塑料开模,在保证轻量的前提下满足机身强度的要求。机身、传动机构、头部、翅翼、尾翼等模块均设计为可拆卸结构,易于携带。在硬件层面,该团队自主设计超轻扑翼飞行器用控制电路板,创新性地采用双MCU硬件架构,主控板的质量仅为2.2g,厚度为0.8mm,面积为8.5cm²。在软件层面,团队自主研发了基于FreeRTOS操作系统的高效飞控算法,实现了一键启停、遥控飞行、盘旋飞行、自稳飞行及图传监控等功能。
海底地质调查钻探监测机器人团队
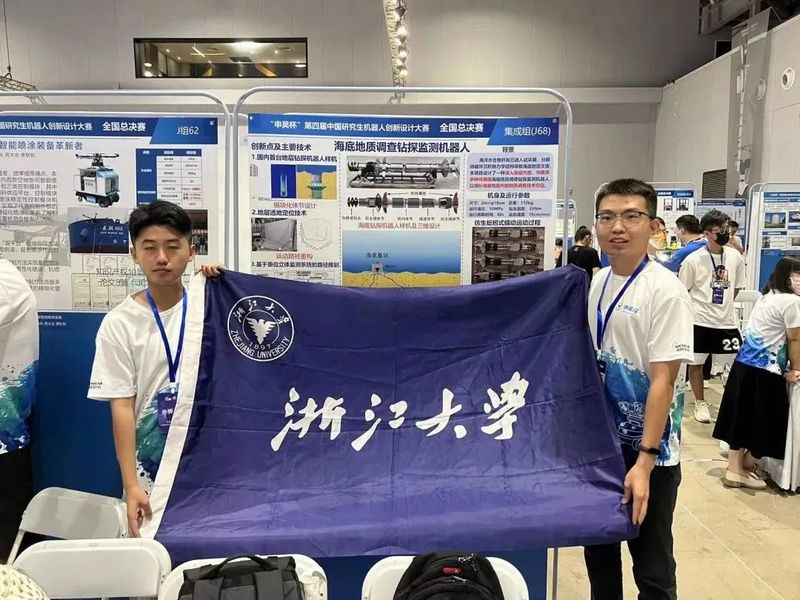
团队成员: 张培豪、林型双、翁子欣、任自强、葛勇强
指导老师:陈家旺
项目简介:该参赛作品面向海底天然气水合物勘探等深海资源开发领域,设计并研制了一套海底地质调查钻探监测机器人,以填补海底地层内部地质调查技术空白。该机器人能够携带多种传感器进入地层内部,通过仿蚯蚓式蠕动钻进实现灵活运动,采用惯性导航及磁信标组合定位的方法实现机器人的透地定位,并将获得的地层地质信息进行强化学习处理实现对机器人运动的路径规划和自主控制。该机器人是国内首套瞄准海底地层钻探工程应用的机器人装备,开辟了水下机器人研究的新领域。
基于多级感知柔性皮肤的双臂智能安全交互机器人团队
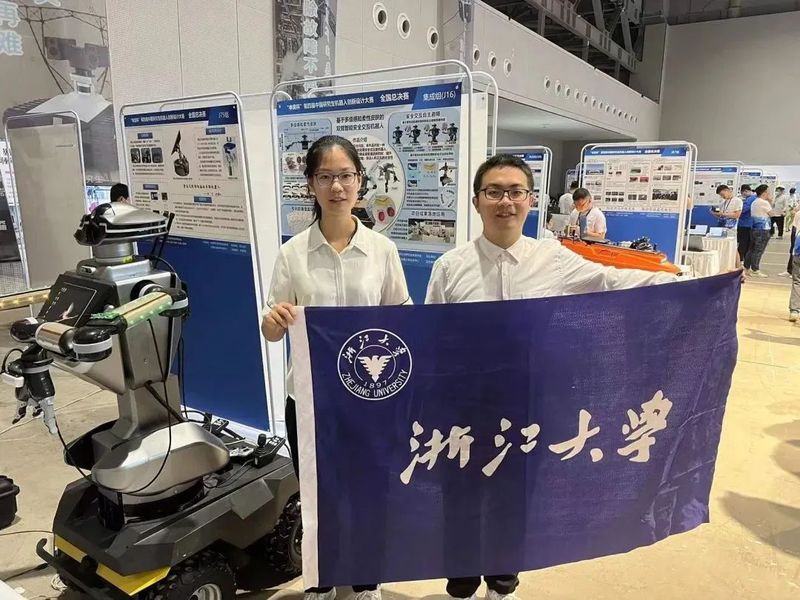
团队成员:汪若菡、李晨、李乐、张楠、邹宜桢
指导老师:杨赓、吴海腾
项目简介:针对人机交互过程中的安全问题,该作品旨在提升现有机器人平台的环境感知功能,构建了一种可大面积贴附于机器人表面的多节点、可扩展的柔性电子皮肤。基于自电容的感知与主动屏蔽机理,利用导体靠近传感器所引起的电容变化量实现对环境障碍物的多级感知,采样频率可达80Hz,其最大检测距离、响应时间/恢复时间、灵敏度、信噪比等参数相比同类型传感器性能有显著提升。同时,结合自主避障的人机安全交互策略,使机器人在执行现有任务的同时规避障碍物,保障了人机交互过程中的安全性。