
近日,国际著名学术期刊 Advanced Science (IF=16.806) 封底刊发了来自浙江大学 邹俊教授课题组的高速软体抓手的最新研究成果。林杨乔博士是论文的第一作者,邹俊教授为论文通讯作者。

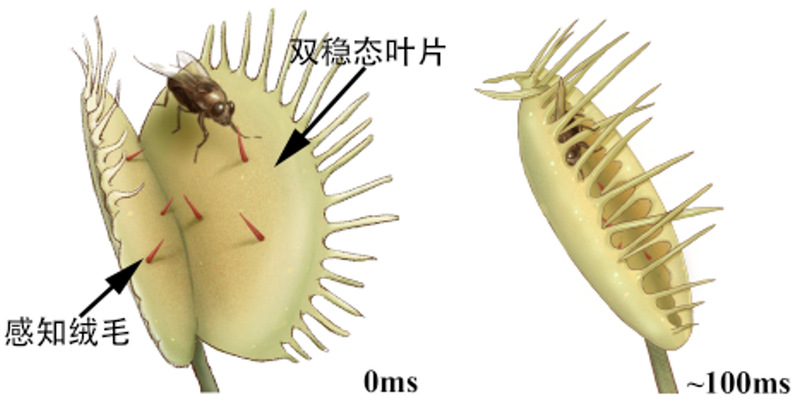
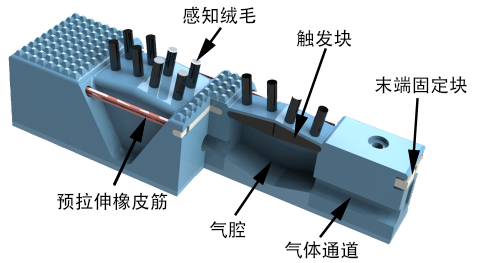
应激反应是生物体的基本特征之一,动植物基于应激反应的方式对外界环境刺激做出快速反应。一个典型例子是捕蝇草的捕食反射:捕蝇草能够通过其柔软的末端叶瓣以极快的速度感知和捕食昆虫。论文中提出的高速软体抓手(High-speed Soft Gripper)正是模仿了捕蝇草的应激捕食方式,通过双稳态软结构在预应力作用下的不稳定性,使高速软体抓手能够感知机械刺激并立即致动。
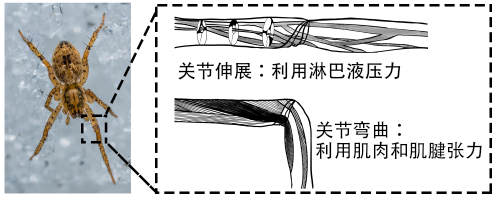
文中的高速软体抓手的设计受到了蜘蛛液压关节的启发,实现了可重复、可控的应激反应。为了适应捕猎需求,蜘蛛腿部的主要关节(即股骨-髌骨和胫骨-跖骨关节)内部完全充满了屈肌。而伸展腿部关节则是利用其前体血淋巴压力的增加。文中的高速软体抓手采用了类似的结构设计,使用预拉伸的弹性绳模拟收缩肌肉和肌腱,气动压力模拟血淋巴压力。
通过独特的双稳态结构,当手指感知到外界的触碰时,能够产生快速的弯曲跳变。
通过主动控制气压来改变跳变的敏感度。
也可以实现主动跳变。
利用其手指末端的被动感知的能力,完成物体的自动抓取。
适应不同形状的物体抓取。
无需传感器即可感知到递过来的瓶子。
通过主动压力控制,进一步拓展了抓取的适应性。

轻巧地抓取蛋黄等易碎物品。
▼
应激反应机制是生物体应对复杂多变环境的一种底层机制。尽管高等生物已经进化出了基于大脑的决策系统,但是仍然保留了这个底层机制对环境变化做出快速响应。类似的机制可以在一些简单的人工系统中看到,例如捕兽陷阱和电路中的热断路器。本文的工作取法自然,实现了软体机器手“快速”与“灵巧”的统一,使其兼具灵巧操作和快速抓取的能力,为下一代高性能软体机器人的设计提供了新的思路。
原文链接(点击文末左下角阅读原文可直接跳转):
http://dx.doi.org/10.1002/advs.202102539