
近日,浙江大学机械工程学院赵朋教授在国际著名学术期刊Nano Energy (IF=17.881)上发表原创研究论文:受折纸启发的多功能磁控柔性驱动器(Origami-inspired magnetic-driven soft actuators with programmable designs and multiple applications)。硕士生唐道梵与博士后张承谦为共同一作,赵朋教授为通讯作者。
近年来,磁控柔性驱动器凭借其响应速度快,易于远程控制,环境适应性强等优势在众多领域得到了广泛应用。然而,目前的磁控柔性驱动器存在制作流程复杂、结构功能单一等问题,使得其进一步发展与应用受到严重制约。针对这一挑战,赵朋教授课题组受传统手工艺折纸工艺的启发,结合磁性柔性材料结构易形变、内部磁矩可编程的特点,研究出一种基于折纸原理的磁控柔性驱动器的设计与制作方法,该方法极大地简化了传统磁控柔性驱动器的制造流程,同时赋予了磁控柔性驱动器更加复杂的三维结构,实现了更加多样化的功能。
从折叠原理到多样化结构
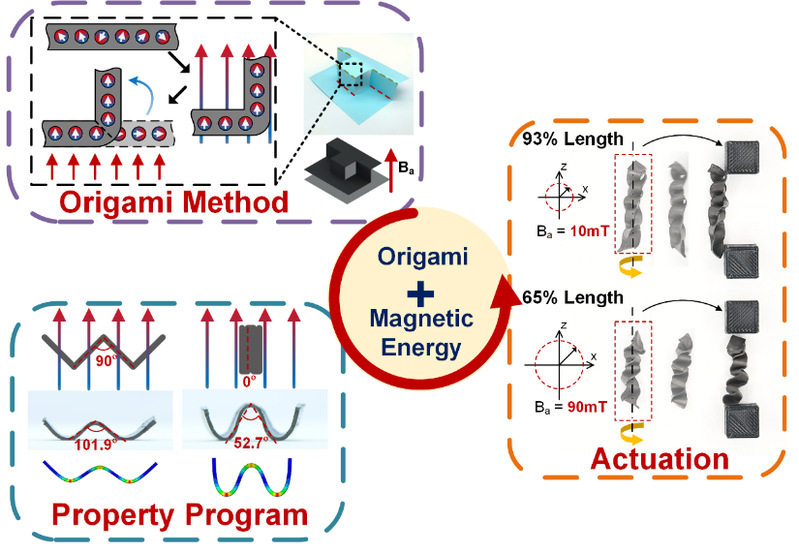
磁控柔性驱动器可由外加磁场操控,其形变功能取决于内部磁矩与外部磁场间产生的力矩。基于这一原理,该研究采用先折叠再充磁的方式:以未磁化的磁性薄膜材料为“纸”,通过折纸设计来实现多样化的折叠结构;再利用高强度充磁磁场进行磁化,材料内部的磁性微粒在强磁作用下有序排布,在宏观层面上呈现出方向与充磁磁场一致的磁矩。该方法高效便捷,在保证了磁性材料内部磁矩强度的同时,实现了磁控柔性驱动器从二维结构到三维结构的转变。
该研究结合力学模型与有限元分析,进一步探究了通过折纸方法制作而成的磁控柔性驱动器的力学性能。实验发现,通过折纸折痕排布与折叠角度设计,材料内部的磁矩方向与材料形变程度可以得到精确调控。
借鉴折纸图案,该研究展示了多种不同结构与形变特征的磁控柔性驱动器。在外加磁场作用下,柔性驱动器的平均响应时间小于0.5秒,同时结构变化万千,可根据实际情况,采用折纸的思路来设计与制作以满足不同场景与功能的需求。
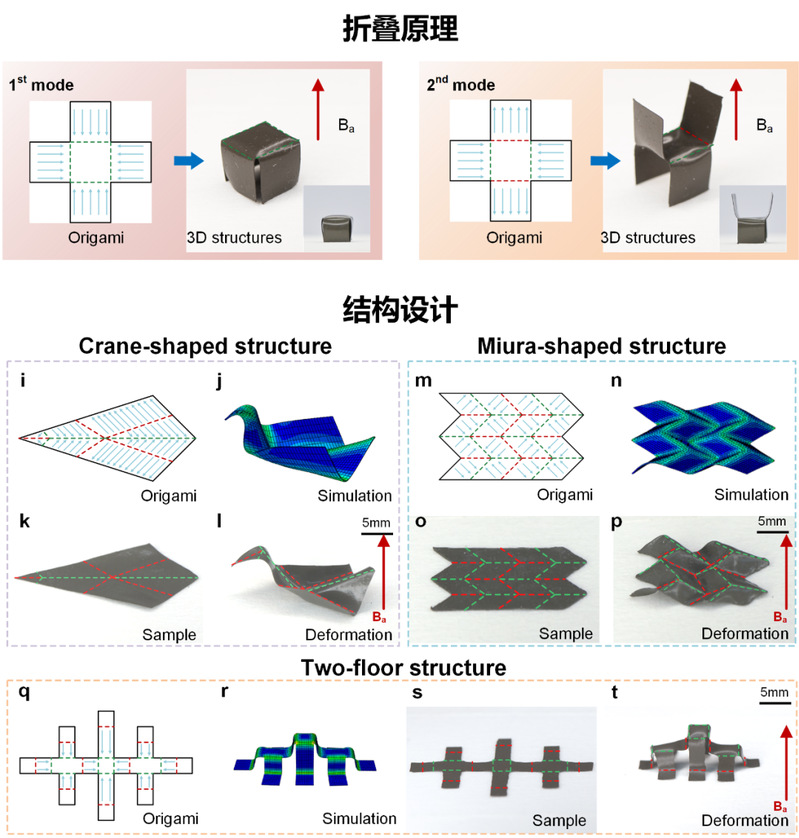
图1 磁控柔性驱动器的基本折叠原理与多样化结构设计
折纸移动机器人设计
该研究基于折纸方法设计制作了一种新型可收缩柔性移动机器人,该机器人在结构上由多个伸缩单元串联构成。结合其内部的磁矩排布,该机器人可在低强度磁场(10mT)驱动下实现磁驱滚动,而在高强度磁场(90mT)作用下,该机器人还能实现体积伸缩,伸缩率可达35%。该结构设计融合了可控移动与体积收缩的功能,与传统磁控机器人相比,具有更强的环境适应性。
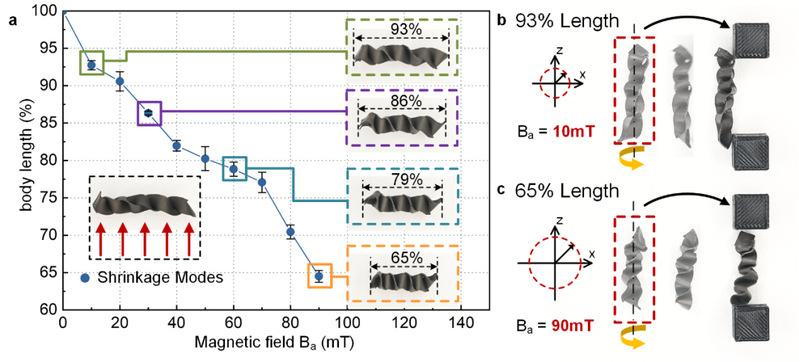
图2 磁场驱动的长度可伸缩移动机器人
折纸柔性光圈设计
磁场具有穿透性强的特点,适合用于无线操控与供能。结合折纸结构,该研究设计出一种可有磁场无线驱动的柔性光圈,该光圈具有独特的形变结构,可经由纵向方向的结构折叠实现横向方向的面积收缩,面积收缩率高达87%。结合控制程序,该研究使用磁控光圈实现了实验光线的大范围色域调控,充分展示了磁性材料与折纸结构结合的潜力。
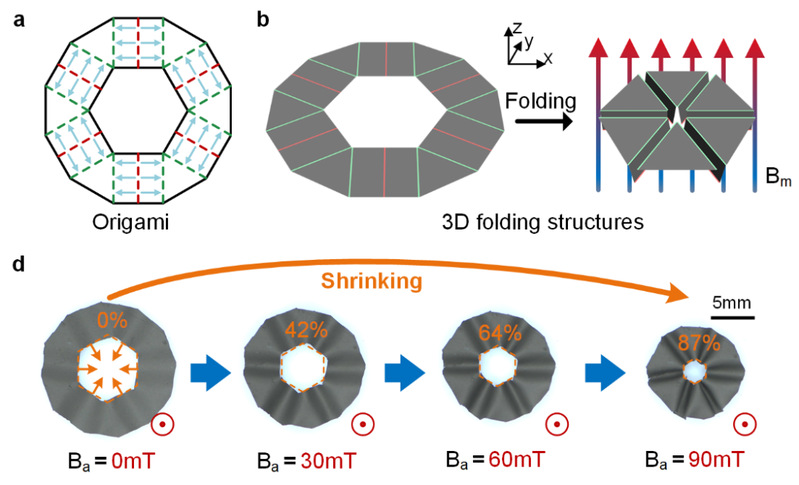
图3 磁场驱动的尺寸可收缩光圈结构
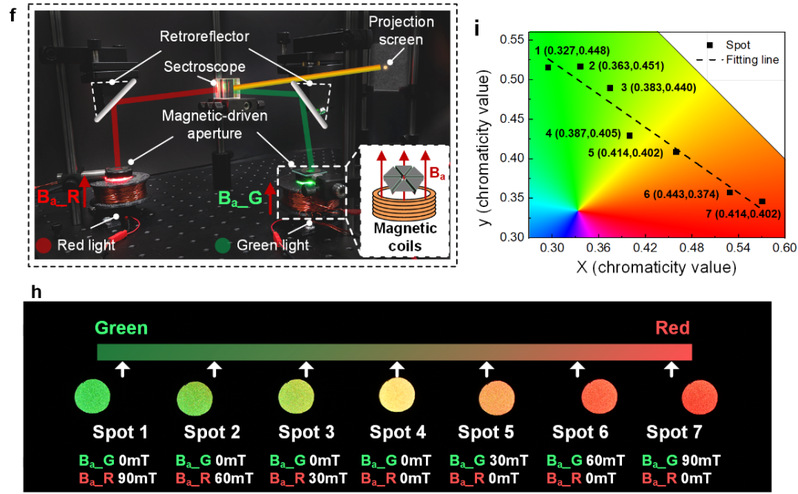
图4 折纸结构磁控光圈对光线色域调控
题为“Origami-inspired Magnetic-driven Soft Actuators with Programmable Designs and Multiple Applications”的原创研究论文已在Nano Energy期刊上在线刊登,链接地址如下 :doi.org/10.1016/j.nanoen.2021.106424。