
现有的流体驱动柔性系统基本遵循泵、阀、管路、执行元件的常规构型思路,响应频率和输出能力成为制约流体驱动柔性系统应用的瓶颈之一。近期浙江大学机械工程学院邹俊课题组突破这一常规构型,创新地将电流体驱动电极布置在一个封闭型的柔性腔的内外侧,实现了电液泵送与位移执行的一体化,极大地改善了柔性电液执行器的输出性能。
国际知名学术期刊Science Advances报道了来自浙江大学流体动力与机电系统国家重点实验室这一最新研究成果“Self-contained soft electrofluidic actuators”。该研究获得国家自然科学基金重大项目“智能电静液驱动执行器基础研究”经费支持。论文全部作者均出自杨华勇院士团队,博士研究生唐威为论文第一作者,张超副研究员和邹俊教授为论文通讯作者。
研究背景
人体内的白细胞可以通过体液的流动来驱动细胞膜的变形,受到这种驱动方式的启发,我们将正电极、介电液封闭在一个柔性腔内,通过正负电极间非均匀电场所诱导的介电液流动,来改变封闭的柔性腔形状,从而创新地构造出一种结构简单、制作方便的一体化柔性电液执行器。
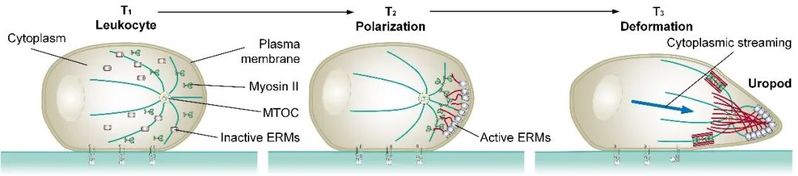
白细胞变形运动
结构与原理
如图所示,一个线性柔性电液执行器由柔性外壳,介电液体和柱状电极组成。柔性电液执行器可以在水中使用也可以在空气中使用:在水中使用时,当柱状电极接正电时,水可以作为接地电极;在空气中使用时,将黑炭膏涂在执行器表面作为接地电极。
其工作原理是:柱状正电极与外界接地电极形成的电极对结构,构建了一个平面型的柔性电液泵,当通电时,介电液向下流动,引发了执行器的伸长变形。
同时,为了提高柔性执行器的变形能力,我们在介电液体中溶入水凝胶,提高了液体的介电流动能力,实现了执行器更大的伸长变形。
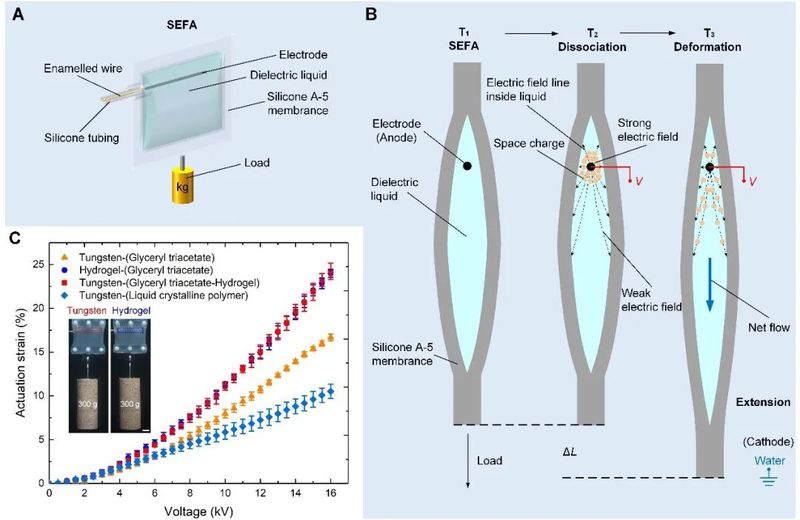
柔性电液执行器的结构及驱动原理
响应速度及人工肌肉应用
300g负载的情况下,线性柔性电液执行器的响应频率可到10Hz。这种线性执行器可以很简单的通过串并联,来增大输出位移和输出力。多单元的串联可以增大输出位移,多单元的并联可以增大输出力。通过6个基本单元的串并联,可以拉动500g的砝码,3个基本单元的串联用于拉伸机器关节,其位移曲线也说明了这种柔性电液执行器可实现快速的驱动,同时具备良好的控制性能。
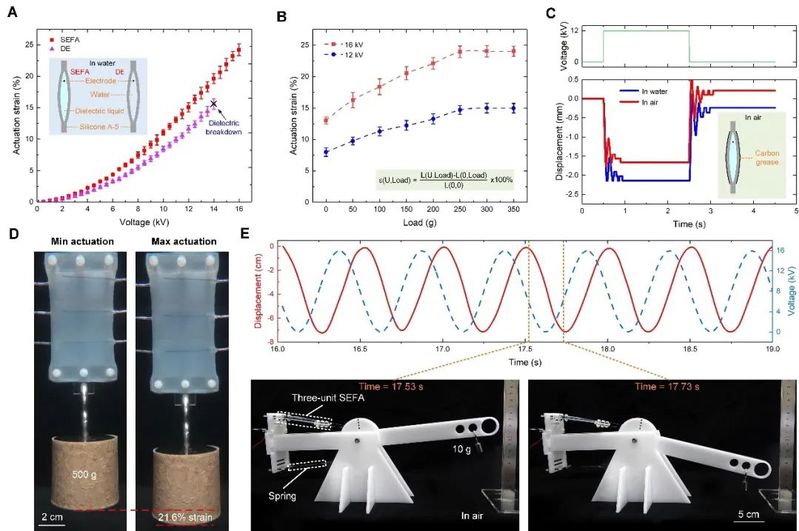
柔性电液执行器的响应速度及作为人工肌肉的应用
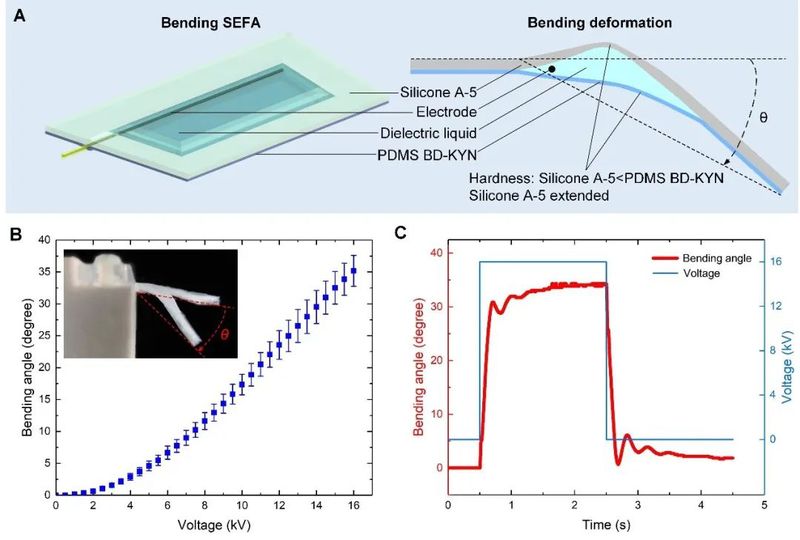
弯曲型柔性电流体执行器
我们也可以通过柔性电液执行器的膜的刚度调配来实现的运动的改变。例如:我们将其中的一张膜用硬度大一点的替换掉,柔性电液执行器就可以实现弯曲运动。弯曲型柔性电液执行器在水中的响应频率可到30Hz。
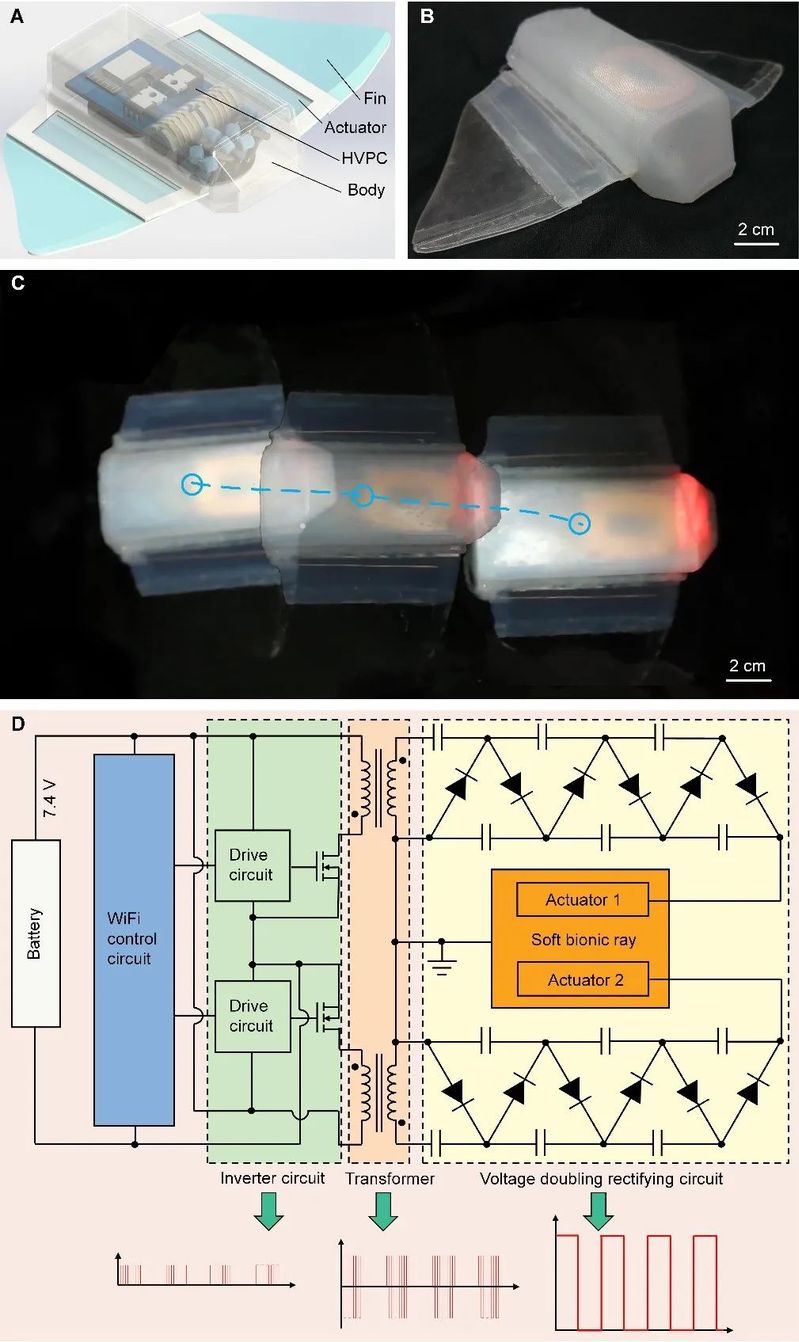
机器人应用
机器鳐鱼的两个鳍是我们用弯曲型的柔性电液执行器制作的,可以独立控制,由两路独立输出的小型高压功率转换器驱动,并且其可以通过WiFi模块由手机控制,电池和小型高压功率转换器都集成在机器鳐鱼的身体中,通过鳍的扇动实现了机器鳐鱼的水下运动。
仿生机器鳐鱼
总结
总结来说,该柔性电液执行器具有以下特点:
(1) 一体化程度高:将泵与执行端设计在一个封闭型的柔性腔内;
(2) 响应频率快:封闭区域的介电液流动与结构变形耦合在一起;
(3) 液体增强:在介电液体中溶解水凝胶,提高了液体的介电流动能力;
(4) 可控性强:高度集成的电驱模块实现了变形的精确控制;
(5) 携带性好:较小的体积和较轻的质量。
邹俊教授表示:这项研究工作为流体驱动的柔性执行器的提供了新的解决方案,大幅度提升了柔性电液执行器的输出性能,为机器人系统和穿戴式装备的驱动提供了新的思路。目前开发的柔性电液执行器只是初期版本,在制作方法、结构设计、介电液材料、变形运动设计等方面还有很多的可以探索的地方。
原文链接(点击文末左下角阅读原文可直接跳转):
https://doi.org/10.1126/sciadv.abf8080