
由于功率密度大,介质适应性强,流体驱动系统在软体机器人中被广泛应用。但是,作为动力系统核心的柔性泵存在着输出性能差、易损坏、易泄露等问题,这严重阻碍了软体机器人的推广与应用。近期,浙江大学机械工程学院邹俊课题组在该领域取得重要进展,研制出一种可实现快速、大面积自修复的、具有自我保护功能的电流体驱动系统,该系统由柔性电流体泵、执行器、自修复液体和多功能电子皮肤层组成。国际知名学术期刊Nature Communications报道了来自流体动力基础件与机电系统全国重点实验室这一最新研究成果“Self-protection soft fluidic robots with rapid large-area self-healing capabilities”。论文全部作者均来自杨华勇院士团队,唐威博士为论文第一作者,邹俊教授为论文通讯作者。
✦
研究背景
✦
本论文是唐威 博士研究课题 的重要组成部分,是基于电流体动力的柔性驱动的关键技术研究的一部分。
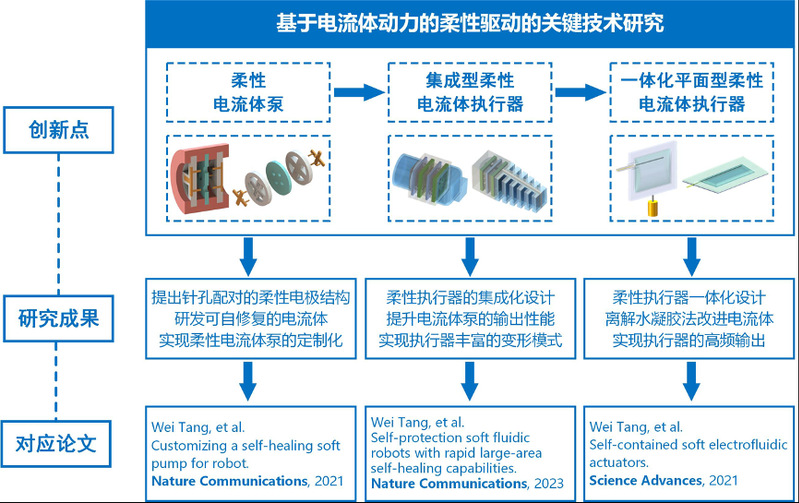
电流体动力技术(Electrohydrodynamics, EHD)可以通过电场直接驱动流体,具有静音、无可动部件等优点,是软体机器人驱动的重要实现手段之一。但是柔性流体驱动系统存在易损坏,易泄露等严重问题,阻碍了软体机器人的推广与应用。固体的自修复研究已经有很多年的历史,但是自修复所需时间长,且只能修复小面积的损伤,实际中很难被应用。我们在先前的研究中(Wei Tang, et al. Nature Communications, 12:2247, 2021),首次提出使用液体实现软材料的自修复方法。但是自修复后形成的柔性膜存在粘接性、拉伸率差(<20%)的问题,同时只能修复小面积的损伤,修复时间长达数小时(>6小时)。
✦
设计策略及高性能电流体静音泵
✦
人体包含典型的流体动力系统:以心脏为流体动力源,通过皮肤感知判断损伤,损伤后主动采取保护措施,通过凝血实现大伤口的自愈。受这一机制的启发,我们研发了一种具有自我保护能力的电流体驱动软体机器人。机器人感知到损伤后会采取保护措施,通过快速修复,实现自我保护。我们研发的柔性电流体泵驱动具有自修复功能的液体,为机器人提供动力。当机器人遭受损坏时,电子皮肤层检测到电阻的异常变化,机器人会意识到自身受到损坏;机器人会通过电子皮肤层的加热来加速愈合过程,实现机器人的自我修复。论文中研发的自修复液体具有良好的电驱动和愈合能力,形成的自修复柔性膜粘接性强、可拉伸性优异(>1200%),同时能够实现软材料的大面积自修复。板载电路能够对异常信号进行检测、判断、发出加热等指令。
论文中我们提出了一种新的电极对形式,称之为圆锥阵列-多孔板电极对。使用圆锥阵列做作为电流体泵的正电极,多孔板作为负电极,相比于之前报道的圆柱电极,圆锥电极能产生更强的电场,从而实现增强EHD流动的效果。我们采用多材料3D打印来制造电流体泵,使用导电TPU打印泵的电极,不导电TPU打印泵的壳体和电极支撑板,进一步提高电流体泵的输出性能。实验结果表明,圆锥阵列-多孔板电极及3D打印的方法形成的高性能柔性电流体静音泵,相比于Stretchable EHD Pump(Vito Cacucciolo, Nature, 572: 516-519, 2019)系统响应速度提升120倍以上。
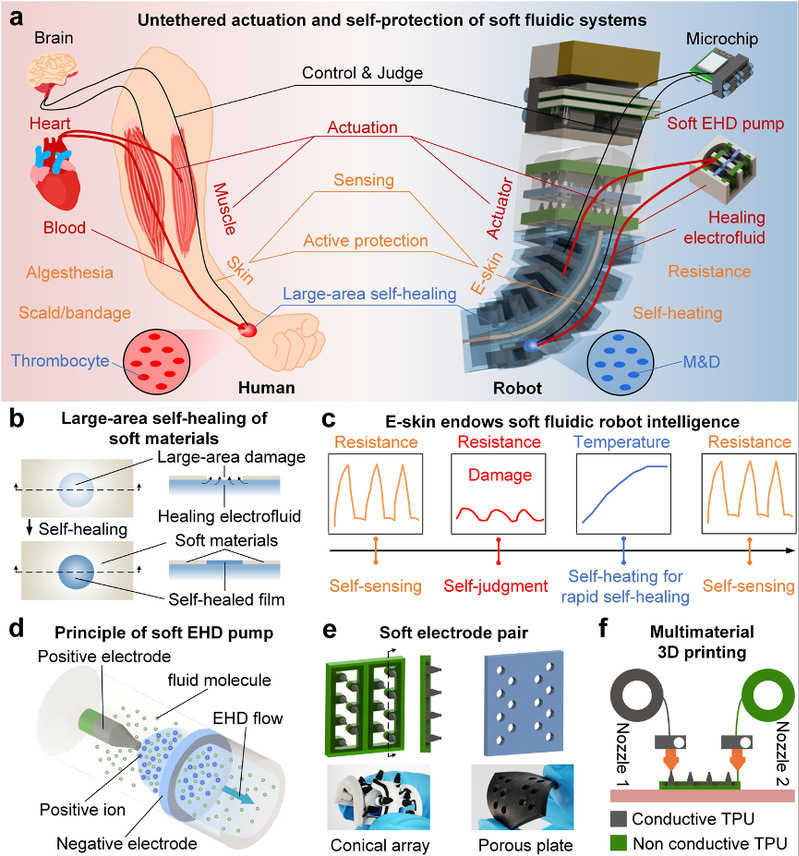
图1. 电流体驱动软体机器人的设计策略以及高性能电流体泵的原理及3D打印
✦
快速驱动
✦
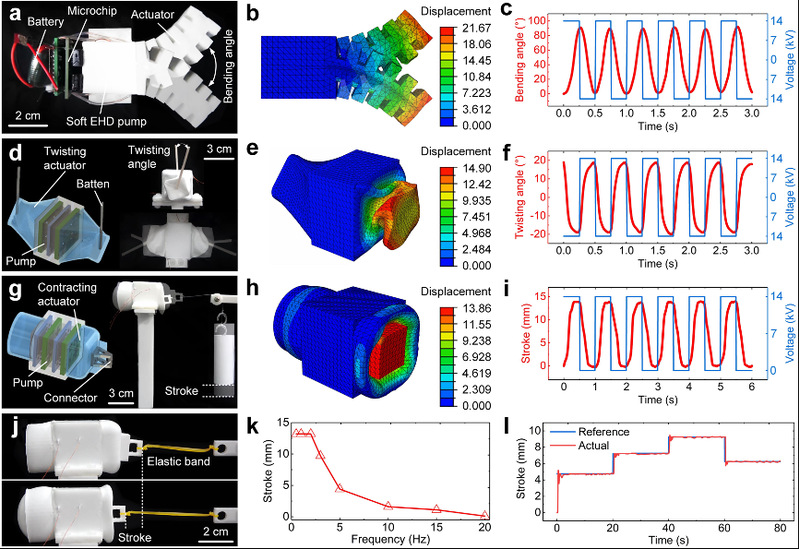
针对现有机器人系统中包含的弯曲、扭转、收缩三种基本运动,我们设计了相应的电流体驱动软体机器人系统并进行了驱动测试。仿真与实验测试具有较好的一致性。频率测试表明:机器人在20 Hz之内可产生一定的变形,当频率达到 1 kHz 时,机器人内的泵产生高频振动,机器人无明显变形。该类软体机器人极大地突破了集成型流体驱动软体机器人的频率瓶颈(通常为1 Hz)。PID闭环控制系统的结果表明,该类机器人系统具有较好的可控性。
✦
自我保护及快速大面积自修复
✦
我们研发了一种基于液态金属的电子皮肤层嵌入到执行器中,当机器人驱动时,电子皮肤层随之变形,皮肤层输出的电阻值发生变化。变化的电阻值可用于反映机器人的变形状态,实现机器人状态的自我感知。
为了解决软材料大面积自修复的挑战,我们制备了一种自修复液体,它由电流体、甲基三乙酰氧基硅烷(methyltracetoxysilane)和二丁基二月桂酸锡(dibutyltindilaurate)合成。该液体暴露于空气时,可以固化成粘接性强、可拉伸性优异的柔性膜。测试表明:自修复液体可以填补大面积破损,实现硅橡胶的修复。修复后的硅橡胶拉伸率达到700%时,自修复柔性膜仍能牢固地粘接在破损处。该方法能实现大面积的破损自修复,这也是固体自修复方法目前所无法达到的。
我们发现温度对自修复电流体的固化时间有显著的影响。当温度达到150℃时,固化时间为83 s,当温度达到250℃时,固化时间为10 s。较高的温度可以大大缩短自修复的时间,因此我们将自加热作为机器人实施自我保护的措施。利用电子皮肤层的电阻网络实现了感知与加热一体。当机器人破损时,液体泄漏或者气泡进入对机器人的变形会产生影响,这一影响可通过电子皮肤层的电阻变化被感知出来。我们开发了一个自我判断的数学模型,让机器人可以判断自身的状态。当机器人判断其受损时,电子皮肤层自动从感知切换到自加热功能,加速机器人的自我修复,实现自我保护。
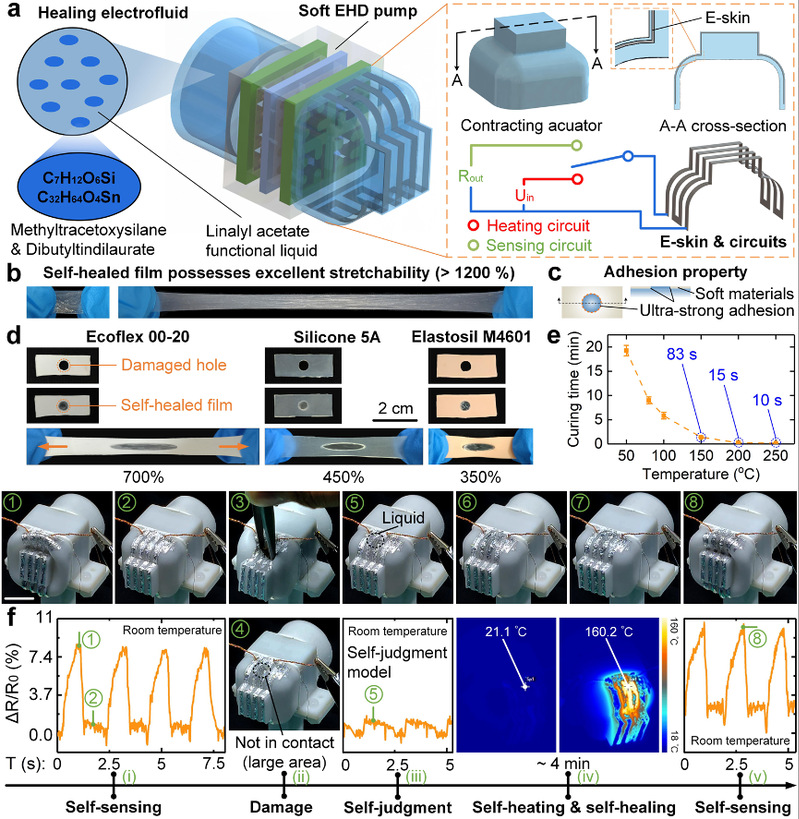
图3. 电流体驱动软体机器人的大面积自修复和自我保护机制
✦
功能增强和应用
✦
通过电极或者执行器的组合可增强机器人的功能。机器人在50 g的负载下可以达到10 mm的最大行程。添加更多电极对后,机器人可以达到 330 g 的负载能力。电流体驱动集成型柔性抓手可以抓住一个快速下落(65 cm/s)的乒乓球,说明系统具有较快的响应速度。机械筛子可实现大小珠子的快速筛选,验证了执行器具有较好的单独/序列控制特性。结合电子皮肤层的加热和电流体的驱动功能,我们开发了一种可穿戴触感、温感装置,可以为指端提供触觉和温感,表明了电流体驱动系统在可穿戴设备中的应用潜力。

图4. 电流体驱动软体机器人的功能增强及应用
✦
总结
✦
(1) 提出圆锥阵列-多孔板电极对结构和使用多材料3D打印的方式来设计和制造柔性电流体泵,实现了柔性电流体泵的高性能静音输出,将集成型流体驱动软体机器人的系统响应频率提升到20 Hz以上。
(2) 合成了一种新型的自修复液体,兼具电驱动和优异的愈合能力,形成的自修复柔性膜粘接性强、可拉伸性优异(>1200%)并具有快速修复能力(10 s, 250 ℃),可以实现软材料的大面积快速修复。
(3) 研发了一种电子皮肤层,兼具自感知和加热功能,结合电流体驱动和板载电路,实现了机器人的自我保护,该过程包括感知、损伤判断、加热、大面积修复,实现了机器人的具身智能。